※2011年2月更新
| RPU-10_IDチェッカー(2011年2月改版) |
RPU-10/11経由でサーボのIDをチェック/書き換えするツールです。
機能としてはMotion Editor RPU-10/11のサーボパラメータ編集画面のID変更だけを抜き出したものになります。
名前はRPU-10になっていますが、実際にはRPU-11(G-ROBOTS GR-001など)にも使えます。
双葉電子工業のWebにて公開された、RS232CからRPU-10経由でRS485へ通信する機能を利用しました。
参考資料はこちら:
http://www.futaba.co.jp/robot/index.html
http://www.futaba.co.jp/dbps_data/_material_/localhost/robot/servo/manuals/info_RPU-10_RS485.pdf
個人的にVBで適当につくったものなので、不具合があるかもしれません。
本ツールの使用により生じたいかなる損害についても責任を負いかねますのでご承知おきください。
そんな何が起こるってものでもありませんが、建前として。
とりあえずツールのみの公開としますが、希望者がいたらソースも公開します。
要望等はuemurakoubou2004あっとyahoo.co.jpまで。(”あっと”を”@”に変換してください)
操作手順は次の通りです。
- PCとRPU-10をRS232Cケーブルで接続する。
- RPU-10のロータリースイッチを0番にして、電源を入れる
- 本ツールを起動、操作する
Motion Editorやターミナルソフトは起動しないか、起動しても切断状態にしておいてください。
(本ツール自体は各機能の動作時にしかCOMポートをオープン/クローズしません)
※2011年2月更新版
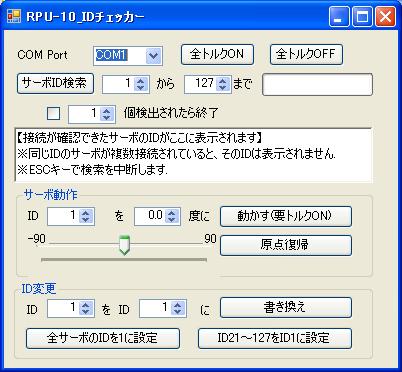
画面構成はこれだけです。
個々の機能は次のようになっています。
【COM Port】
使用するCOMポートを選択してください。
【全トルクON】【全トルクOFF】
接続されているサーボ全部に対して強制的にトルクON/OFFを指示します。
これで全く反応が無かったら、COMポートが間違っているか、電源が入っていないか確認してください。
【サーボID検索 (XXからYYまで)】
RPU経由で接続されているサーボのIDを検索します。
チェックされるIDはXXからYYの範囲になります。
接続されていないサーボのチェックには若干時間がかかりますので、
検出範囲を制限しても良い場合(IDの見当が付いている場合)はここで制限した方が楽です。
※2011年2月更新版で追加
検索作業中、ESCキーで検索中断するようにしました。
中断するとそれまでに調べた範囲と見つかったIDが表示されます。
【MM個検出されたら終了
※2011年2月更新版で機能変更
サーボの検索中、接続が確認されたIDの数がここで指定した数に達すると検索を終了します。
【接続が確認できたサーボ表示欄】
サーボID検索中はチェック中のIDが表示されます。
検出完了時は検索した範囲、検出された数とそのIDが表示されます。
【IDxxをyy度に動かす(要トルクON)】【原点復帰】
xxで指定されたIDのサーボをyy度に動作させます。
事前に【全トルクON】などでトルクON状態にしておいてください。
移動時間は1秒に指定されています。
下のトラックバーのカーソルをドラッグすることでもサーボが動作します。
また【原点復帰】を押すと0度が指示されます。
【IDxxをIDyyに書き換え】
xxで指定されたサーボのIDをxxからyyへ書き換えます。
検出に失敗したサーボでも書き換えだけは出来ちゃいます(IDxxのサーボが存在していればですが)
yyが他のサーボのIDと重複していると、次のチェックや書き換えが出来なくなりますのでご注意を。
やらかした場合はどちらか片方を外してからID変更してやってください。
【全サーボのIDを1に設定】
接続されている全サーボのIDを1にします。
実行確認とかやり直しとかは出来ませんのでご注意を!
【ID21~127をID1に設定】
ID21~127のサーボのIDを1にします。
ほとんどGR-001専用の機能ですがw
実行確認とかやり直しとかは出来ませんのでご注意を!
以上! |