第18回かわさきロボット競技大会参加機
クシザシタロウXVI
特別戦出場賞受賞!
タロウシリーズで16台目、クシザシシリーズで6台目、ロッククローラの応用で3台目。
【足先ゴム】
今回の機体で最高額 最大の特徴となる部品、通称”黒ゴーヤ”(命名:松山工業(株)社長)金型起しちゃいました ので。金型依頼したときの図面はこちら(pdf、160kb) グリップの効き具合がまるで違います 。【方法1.自作】 切削中は絶対に機械から目を離さないようにしてください。 【方法その2.外注(切削)】 【方法その3.外注(金型)】 My金型持ちに!w 欲しい人いたら売ります。
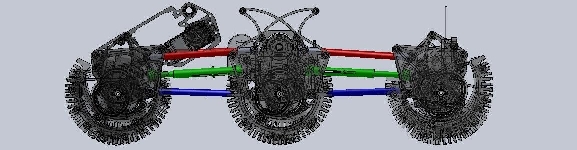
【足先構造】
一昨年にカンタンク氏に教ったものの昨年作りそこない、その後うしとら足としてネット上で解説記事が出ていたものを読んでようやく作り方を理解した構造。動きとしてはヘッケンタイヤに近い(というか同じ)ものになっています。SEKIベアリング でサイズ+『最も安価なメーカー、中国製品可』で指定して1個600円くらいでした。
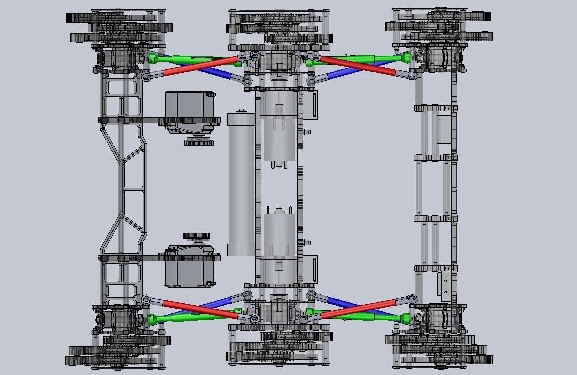
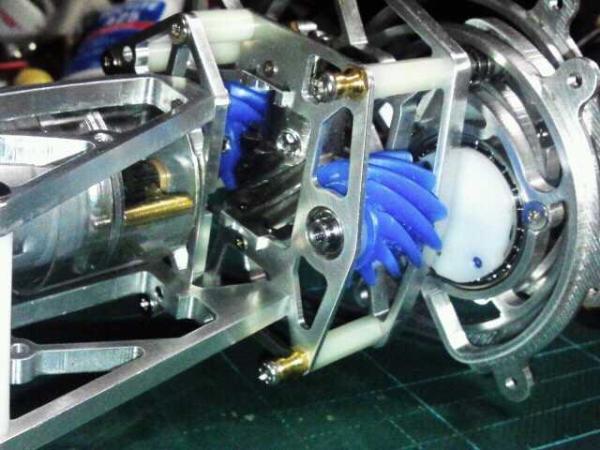
【脚ユニットの構造】
脚は大きく前足・中足・後ろ足に分かれ、それぞれ自作のアームで繋がっています。ホップアップオプションズ No.1257 OP.1257 5mm強化アジャスター (グレイ8個) 54257 。ホップアップオプションズ OP.1113 CR-01 カーボンスチールプロペラシャフト(95mm) 54113 ねじ歯車 が正解です。KHK(小原歯車工業) 製品で、モジュール1.5、歯数10枚の右ねじタイプ。購入はオリジナルマインドさん から。
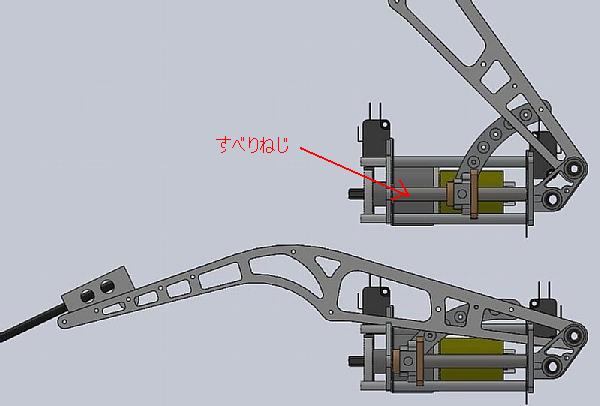
【アームその1:ロッドアーム】
アームは機体後部から伸びるクシザシアーム。本体はカーボン棒で、東急ハンズで1m\3,000弱。パイプを使うと砕け(砕かれ)ますのでご注意ください。 MISUMIのミニチュアすべりねじ になります。KHK(小原歯車工業) 製品Kクランプギヤ、ねじ側の白いのがフェアロックギヤ。これも購入はオリジナルマインドさん から。
【アームその2:シールドアーム】
今回追加した二段目のシールドアーム。大会規定に従ってRCサーボで駆動しています。サーボホーンにギヤ付けて左右二個ずつ計4連装・・・のはずでしたが、重量の都合で2連装になっちゃいました。。KHK(小原歯車工業)さんの歯車計算ソフトGCSW for Web を使ってdxfを入手、それを必要数繋いで作成しています。また歯の強度に不安があったので、どうせ使えない片側だけをフランジ状にして繋いじゃいました。ただ、これの効果がどの程度あったのかは不明。。RS405CB/RS406CB用のメタルホーン 。大体トルクが30kgf・cm超えると樹脂製サーボホーンのセレーションが砕けるので、トルク20kgf・cm以上で振り回すならアルミホーン使った方が良いです。Futaba製BLS172HV 。定格電圧はLiPo2セルの7.4Vなんですが、今回はLiPo解禁ならずだったので電源どうしようかと悩んでいてふと気付いたことが一つ。LiPo2セルの満充電時の電圧が8.3Vくらいで、NiMH7セルの標準が8.4V。これくらいなら許容範囲内じゃね? とかいうメーカーの人間とも思えぬ発想のもと、自己責任で電源直結して使っちゃいました。定格の範囲外の電圧で使うとサーボがぶっ壊れる危険性がありますのでご注意ください。 S.BUSサーボ用設定ソフト『PC-Link』 使って設定いじってます。クシザシアーム要らない子疑惑発生しました 。
【大会結果】
【初戦:VS 霰 snake】 VIDEO 第二回戦:VS ダークリパルサー 】VIDEO
【敗者復活第二回戦:VS 2012】 VIDEO だから突っ込んじゃダメだってば。。>自分
というわけで一勝二敗で予選敗退(‐‐;
【特別戦Aリング】 VIDEO
【反省点とかいろいろ】
●とにかく対戦練習しないとダメ。
もう長いこと問題には思っていたんだけど、やはり対戦形式で練習しないとダメ。。●クシザシ
必ずしも悪いわけじゃないんだけど、長さが中途半端。特に今回はシールドがあったので、そこと明確に分けるためにもあと15cmは長くしたかった。●ポリカシールド
シールドは結構丈夫だし良い感じなんですが、見た目よりかなり重いので使いどころが難しいです。●サーボは強い。
正直なところシールド用のBLS172HVは何個かぶっ壊す覚悟で使ってたものの、練習から本番通じてバカスカ動かしててもまったく壊れる気配なし。さすがにちょっと熱くはなるものの、熱ダレするとか燃えるとかいうレベルには程遠い・・・●ゴム足先はもっと強い。
グリップが効き過ぎちゃって滑らないもので、旋回性が大いに悪くなっちゃってましたよ。むしろコレを使うことで今までどれだけ滑ってたのかを思い知らされたような有様で・・・。
操縦練習とか色々やってみたいので、ちょっとカスタマイズして学際バトルなりKHK杯なりにエントリーしてみようかと思います。まずはサーボ四連装シールドアームのみのササナイタロウにして練習を!w