第20回かわさきロボット競技大会参加機
クシザシタロウXVII

|
タロウシリーズで17台目・・・なんですが
仕事の都合で大会当日は欠席させて頂きましたm(_ _)m
実のところ海外出張で8月8日(木)に出国~26日(月)夜帰国というスケジュールだったもので、どんなに無理をして都合つけても24日(土)の夜に成田着にしかならないとわかった時点で直接の参加は諦めていました。でも機体は作っていたので8月5日(月)までに最低限動くところまで作っておいて、あとはまるごと代理の後輩に任せて出られるとこまで出といて!ということで・・・
まぁそんなんでうまくいくわけもないわけですが(^^;
残念ながら今年は会社のブースも前回より狭く展示もできなかったため展示品としてもあまりお役に立てなかったようなので、せめて機体紹介だけでも。
|
【シールドアーム】
前回の機体でクシザシアーム要らない子疑惑が出てきてしまったのと、サーボ駆動アームが意外と強かったのでいっそ開き直ってサーボ駆動のシールドオンリーでやってみようかな、と。
一つ想定外だったのは今回のルール改正による”揺動機構の追加”にサーボ駆動アームも含まれてしまったこと。連続回転できない製品をそのまま使用する、というのがルールだったのでさらに陽動機構を仕込む対象になるとは思っていませんでした。。。
機構考え直さにゃならん頃には既に出張の可能性が出てきていたもので、どうにも気合入れて考えまとめる前に適当な4節リンクになってしまいました。
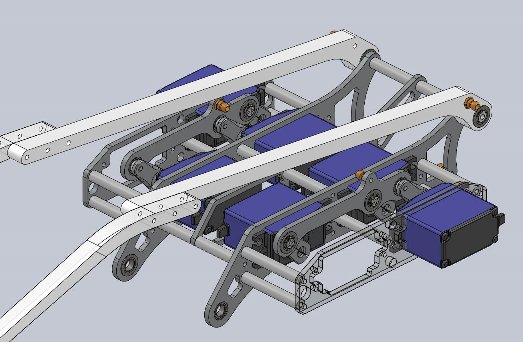
動力源はBLS177SV×6個。
出力的にはBLS172SVと同じなのでそちらで問題無かったんですが、諸々の事情があってBLS177SVを使っています。BLS172SVでプラスチック製だったケースがアルミ製になってるので、そちらで強度持たせられる分フレームの肉を薄めにしたりはしていますが、そのあたりの効果を出すのは次の機体で。 |
【足先構造】
脚の機構的には前回の機体と同じです。
軽量化のためアルミ製だった脚そのものをMCナイロンに変更、両側面の板を7075のt3に変更。
スライダの中のベアリングはボールベアリングからオイレスのドライメットLFに変更しています。
脚裏には昨年金型起こしたゴム製の脚先、通称『黒ゴーヤ』または『ゴーヤ脚』をそのまま利用。
前回大会でグリップが強すぎて旋回が遅いという問題が出ていたので、前後の脚にステアリングを入れてみました。動作の詳細は次の機体でご紹介。 |
【大会結果】
【初戦:VS やまだーんMBT】
転倒スタートのとこの作りが甘かったので出だしが遅く、モタついてるうちに負け。
にしてもよりにもよってこんなんと当たらなくてもwww
【敗者復活第三回戦第三試合:VS ellipse】
後になって分かりましたが、どうやら前足のベアリングが外れて脚がロックしたところに無理やり回そうとしてプロペラシャフトが折れていた模様。なので前足が動かず、ろくに移動できなかった模様。
それでもこんだけ粘ってたことを考えると、ちゃんと動けていればなーと反省。
|
|
【反省点とかいろいろ】
●現場出ないことにゃはじまらん。。。
後輩に現場丸投げしといて言うのもなんだけど、やっぱり現場行かないと何も分からんです。
正直参加したという実感もほとんどないので、一年後に次の大会で終わるまで微妙な心残りがずーっと引っ張ってる、そんな嫌な感じでした。
この年はお仕事で出た方のイベントがイレギュラーな日程で本来5月だったのが8月開催になってしまったのが問題だったので、翌年以降は無事に出れる・・・はず。 |
| ともかく自分でやってみないとわからん、ということで次はこれのブラッシュアップにしてみました。 |