第20回かわさきロボット競技大会参加機
タテツキタロウXIX

|
タロウシリーズも19台目。
昨年の大会直後に入寮期間満了で会社の寮から追い出されることが確定してしまい引っ越し関連でわたわたしていたのと、某案件のお仕事状況がヤバ過ぎてとても設計やってる気分じゃなかったということで着手が大分遅れてしましました。
一方で色々調べていたら新しい加工方法などが使えるところが増えてきたりもしていたので、全部まとめて新要素満載の機体にしちゃいました。 |
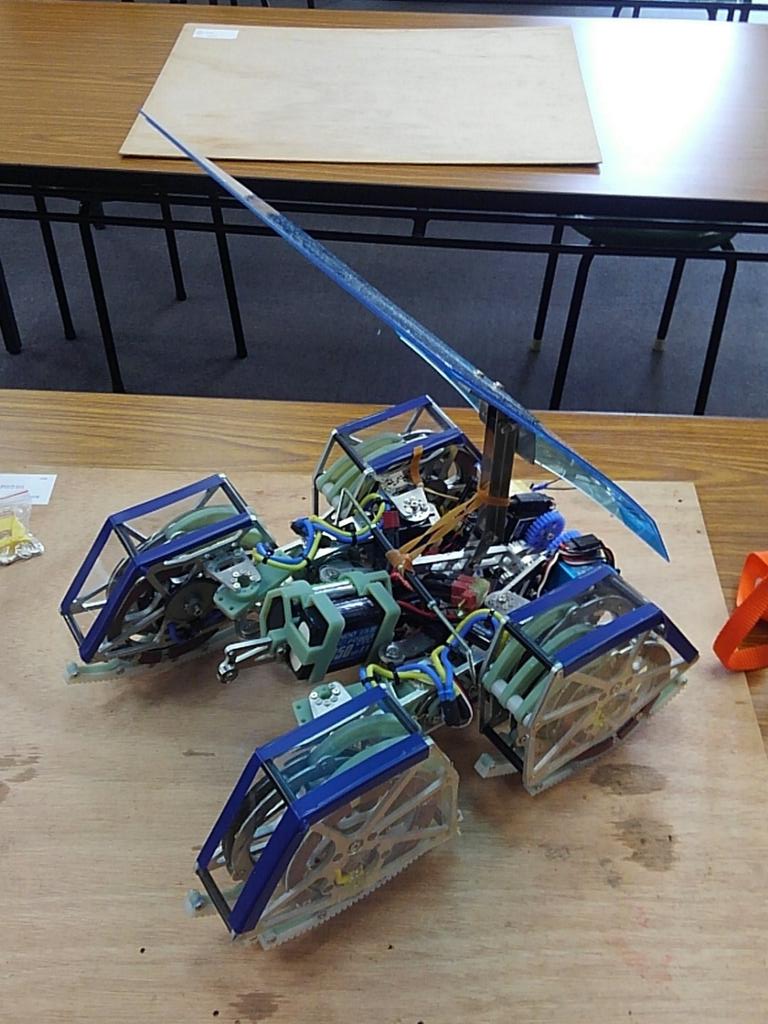
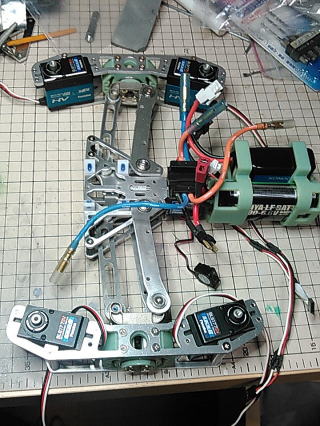
初期姿勢。
脚を畳んでアーム先端を上げています。
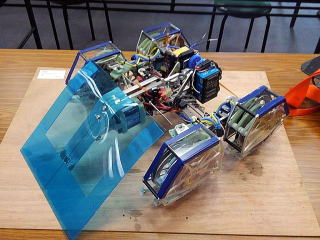
試合開始後。
アーム動かすとトリガーが外れて展開し、脚が開いたところにシールドが下りてきます。
|
【レーザー加工】
アルミ、それも2000系のレーザー加工ができる?という噂を聞いたもので何箇所かレーザー加工屋さんに問い合わせを出した結果、(株)かねよしさんができるということでほとんどすべてのアルミフレームをここに依頼しました。
材料は全てA2017。5000系は切れるみたいですが7000系は無理だそうです。
厚さは脚先のフレームやアームの補助がt1.5、脚回りや胴体のメインフレームがt3、脚の偏芯円板クランクとアームのメインフレームがt5です。レーザーカットなので厚ければ厚いほど断面が汚く、また垂直度合いが低くなっています(表面の方が速く融けるので切断面がV字に広がっていくため)。

断面はこんな感じ。
中央にぽつっと付いてるのは切り始め/切り終わりの跡。一応どこに付けるかも指定可能とのこと。
断面が荒れることもわかっていたので寸法精度は要求せず、dxfの線通りに切ってくれればそれでよい、という条件で出しました。一応寸法入りのpdfも一緒に出していますが、dxfの縮尺ミス等が無いかの確認用としてしか使っていませんので仕上がり具合の納品データも付けてもらっていません。
実際のところ何個か明らかに寸法がずれているところもありましたが、機能的に支障ない部分だったので無視しました(本当ならやり直して貰うところですが、時間がなかったので)。
穴は一応そのままM3のタップ立てたりもできましたが、少々不安もあったのでt3mm以上の材料の穴はドリルでさらい直しています。また転がりを受けるクランクの外周面はひたすらスポンジやすりで削りまくりました。

多分一番厄介だった内歯車(m1.0xZ42)付き偏芯円板クランク(t5)。
歯形はKHKさんの歯車計算ソフトGCSWで生成したdxfを使っています。

歯面は結構傷だらけな感じになっちゃうので、元データの段階で転移係数いじって噛み合い緩めにしています。

初期姿勢からの展開用リンクもギヤと一体で切り出し。こちらは最初結構渋かったので、組んだあと油かけて手で動かして念入りに慣らしをしてから使っています。
大きな穴はボールベアリング突っ込むところですが、ここは後からリーマ通しています。

外周仕上げの様子。偏芯円板の外周円の軸になるところをチャックできるよう治具(白色の部分)を作ってボール盤で回し、外からスポンジヤスリを押し当てて削ってます。
内側も同様に治具を作って地道に削りました。
感覚的には外形をそのまま摺動面として利用したりしない限りは”使える”ように思われます。
値段は切断の回数の影響が大きいようで、外形は同じでも肉抜き穴の数が多い部品の方が大分高くなっていました。できるだけ少ない閉曲線で構成してやる方が良いかも知れません。
切削の外注と比較すると形状次第ではありますが単価は安いように思われます。ギヤ部や内エッジ部等、切削だと作りにくい/作れない形状ができるので設計し易い部分も結構ありそうです。
一方断面の汚さはいかんともしがたく、はめ込みでフレームを組み立てるところは正直追加工で結構苦労しました。必要なところだけ切削で追加工しようにも基準面をきれいに作れないのが悩みどころです。
納期は圧倒的にこちらの方が短いです。最初の4種類30点ちょいは発注から納品まで4日程度でした。
ちなみに別の某レーザー加工専門店さんには「(2000系のカットは)どこに依頼してもできないと思います」とのお断りメールを頂いたりもしました。実際のところ断面は結構汚くなり寸法精度も出せないので「(信頼性のある仕事としては)できない」という意味だったのではないかと好意的に解釈しています。 |
【3Dプリント】
DMM.makeの3Dプリントサービス使って成形してみました。
・ABSライク素材
射出成型品のABSと比較すると表面がボソボソしている感じですが、折れやすいということはないと感じました。ただ若干柔らかいように思われます。
寸法は板厚で図面上の寸法+0/-0.05くらい?結構きれいに出ていました。


バッテリーホルダ。折角なので切削では作れない形状にしています。
ケーブルがあたるのでエッジ部にR0.3~0.5くらいを付けましたが、割ときれいにできてくれました。
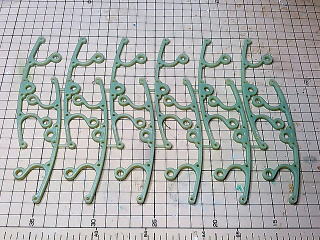
こちらは足裏の中身x12個セット。細いランナーで繋げた状態で1部品にしています。
単独で出力するとイニシャルコストが個数分乗ってしまうので、こうすることで単価を大分下げています。

肉厚の不均一な部分に結構大きくヒケが出てしまいました。
成形(積層)方向は指定ができないので、やってみるまでどこにこれが出るか予想はし難いです。

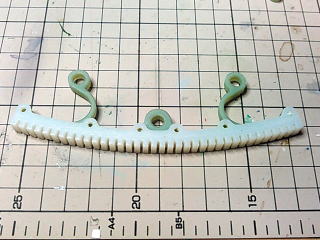
脚の揺動リンク用部品。穴も若干マイナス気味だったので、たまたまですが軸受のドライメットがほどよく軽圧入気味に入ってくれました。

急遽必要になったステアリングサーボの代替品は特急サービスを利用。追加料金が痛かったですが、2営業日で造形開始となりました。
サーボホーンの代わりに8つずつ穴があいていますが、φ1.6の指定でM2タップの下穴として機能してくれてます。
値段的には足裏の中身12個セットが約23,000円、脚の揺動リンク12個セットが約10,000円。
バッテリーホルダは別々に頼んじゃったのでそれぞれ約4,500円くらいでしたが、連結した状態で出力していたらもっと安くなっていたと思います。
特急料金は価格x1.5倍くらいで効いてくるようです。
ゴムライク素材
白色のゴムっぽい何か。硬度は割と固め、多分70度くらいだと思います。
ただ弾性というよりは粘性に近い曲がり方をするもので、外力を加えて曲げてから外力を除去するとすぐには戻らず、じわじわ~っと時間をかけてゆっくりと元に戻るような感じでした。
厚さ方向の寸法は理論値+0/-0.05くらいの精度が出ていますが穴や肉薄部はやや形状が崩れ気味でした。あと細かい溝や穴に同じ材質の削りカスみたいなゴミが詰まり気味だったので掃除が必要でした。

これもABSライクのフレーム同様必要数繋いだ状態で出力しています。
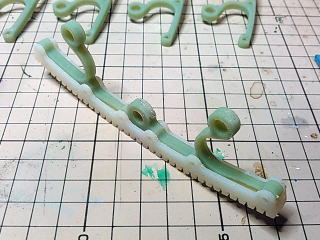
ABSライクのフレームと組み合わせるとこんな感じ。
一応セメダインスーパーX等使えば接着もできそうでしたが、確証が無い&やっちゃうと取り返しがつかないので今回は全部ねじ止めとしました。
値段的にはABSライクと大差ないか体積比率でやや安い程度で、12個セットが約20,000円くらいでした。
チタン
一度はやってみたかった夢のチタンフレームw
粉末をレーザーで焼いて固めている(と思われる)ので表面はヤスリのようにザラザラした質感です。
中はみっちりと詰まっており、重量的には4.5g/cm^3程度はあるので割と重めです。
寸法は図面上の値+0/-0.03程度。ただ凹形状が開く傾向にあるようで、開口部だと+方向に誤差が出ていました。この誤差の出方は開いた部分の幅に影響受けるようです。
穴はいずれもマイナス(狭くなる)方向に誤差が出ていました。 図面上φ3.2の穴にM3のねじを通す際結構ひっかかって大変でした。
固いので追加工は出来るだけしないのが望ましいですが、難削材用の工具を使えば加工できるようです。イシハシ精工のコバルト正宗ドリルで削れそうなところまでは確認しました。また大会後に別部品でM3のタップが立てられることも確認できています。
まだ壊せていないので確証は無いですが、少なくともちょっとやそっとの衝撃で欠けたりするようなことはないようです。

左右の脚ユニットの付け根であり縦横に軸が必要で、かつ変形とサスを支える要の部品で強度も必要だったので思いきってやっちゃいました。
値段は当然高めで、上記写真の部品で1個約1万円。
別の部品と比較した限りではほぼ体積比例で価格が増えるようです。
追加工が困難なため連結した状態で成形して安くするという方法も使いにくいと思われます。 |
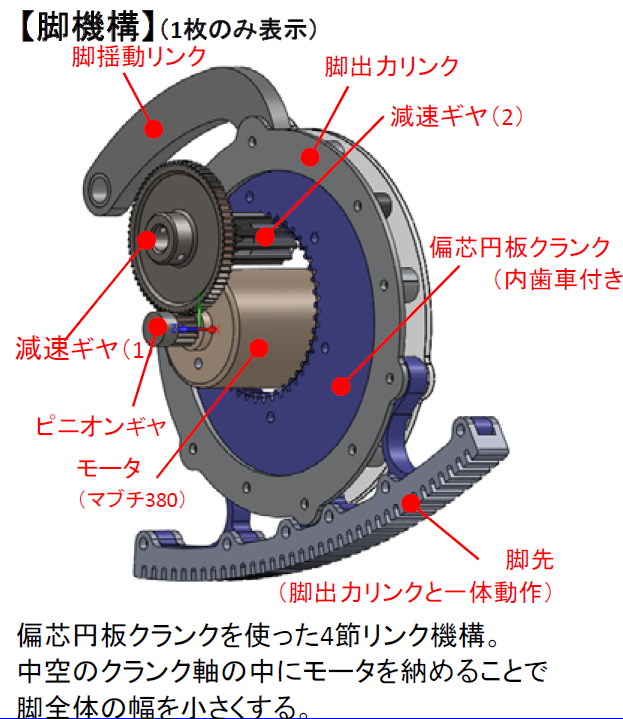
【脚機構】
毎年モータの缶の部分が邪魔に感じていたのでこれを何とかしようと思った結果、インホイールモータのように脚の中にモータを埋め込んでしまえばいいのでは?と思いついたのが動機。アウターローター型のモータだったらもっと簡単にできたんですが、380モータ縛りがあるのでこんな配置になりました。
(基本設計書から抜粋)
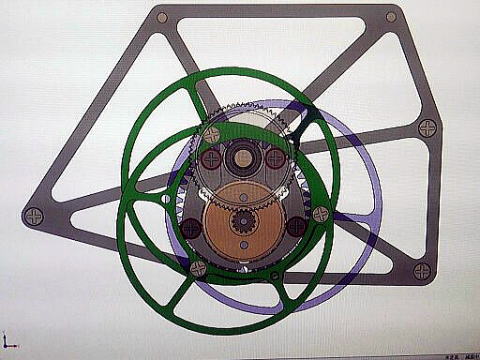
実際には青い内歯車付きクランクの両サイドに120度位相をずらした歯車無しのクランク(緑色)が付きます。
緑色のクランクはフレームに固定された赤色のベアリングに支持されて回ります。
赤色のベアリングは最低3個あれば足りますが、120度等配分できなかったので4個で無理やり持たせています。
クランク三つのうち両サイドの緑色で回転を支え、中央の内歯車を介して回転の動力を伝える、という構成です。
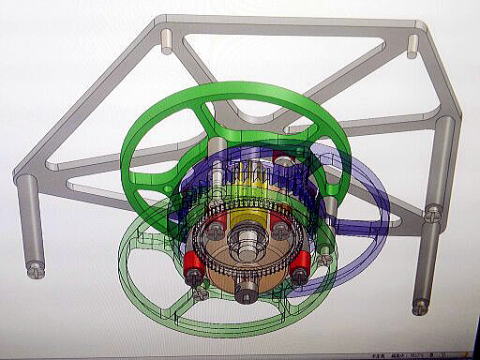
動きはこんな感じ。
正直組み立てられるかどうかCAD上で何度も検証しましたが、実際やってみたら意外としっかり動いてくれました。ただギヤとベアリングに接する面は念入りにグリスアップしています。
構造上モータが外からほとんど見えなくなってしまうため、レギュレーションチェック(380モータを使用しているかどうかの確認)を通るかどうかが内心かなり不安でした。

一応正面から脚の隙間を覗き込むとモータに書かれた内容が見えるようにはしてあったんですが、特に揉めることもなく無事クリア。
・足裏
脚全体が大きくなってしまったのでいつもの黒ゴーヤが使えず、足裏は新造。本当はまたゴムの加工を依頼したかったんですが、時間も無かった&新素材試してみたかったのもあってDMM.makeの3Dプリントのゴムライク素材で作っています。

レーザーカットのアルミフレームにABSライク素材+ゴムライク素材の足裏を足した状態。
足裏の左右にあるアーチ状の部分は弾性変形するのでダンパーというかサスとして機能します。
ゴム脚のヒダは意外と切れず、大会後に見たところ2か所ほど先端が裂けた程度で他は無事でした。
アーチ状のばね部分も大会後の練習で遊んでいたら1個だけ折れたくらいで、他は無事です。
足裏は適当な円弧で近似しただけで正直足音も結構うるさくお世辞にも滑らかではないですが、その割にリング上の丘陵をサクサク登ってくれちゃいました。
特別戦の最中に凹丘を跨ぐかたちでその場旋回したりしていたんですが、たまに下駄丘に引っ掛かる以外は床面殆ど意識せずに動けています。
|
【ステアリング&展開機構】
もともと黒ゴーヤのグリップが強すぎて旋回がやたら遅かったのの対策としてステアリング追加してたので、今回も要るだろうと思って付けてみたら実は無くてもほとんど変わらないという悲しい事実が練習走行会で発覚してしまいました。
四輪全部ステアリング切った場合がこちら。
後輪だけステアリング切った場合がこちら。
おそらくゴムライク素材の方が粘りがなく、また機構的に脚が跳ねるためそれほどグリップが効かなかったというのが理由だと思われます。
重量がギリアウトだったこともあり、最終的には前足のステアリングはサーボを外して固定しちゃっています。
ステアリング機構自体は極シンプルにサーボで脚先のブロックを丸ごと振り回すかたち。
ステアリング軸と脚の接地点が離れているため、アームと同じBLS177SVで無理やり回しています。
脚ブロック全体は試合開始直後に左右に広がります。
横方向のねじり対策というのと、脚を等配分になるようにしたかったからというのが理由なんですが、上記のとおりステアリングそのものがあまり意味が無かったので実は開かなくてもよかったような・・・

初期姿勢時の胴体中央部。画像右が進行方向。
バッテリーとESCを挟み込むように、かなりギッチリ詰まった状態です。
四隅にあるのがステアリング用サーボ。
試合開始後、アームが動くとストッパーが外れて左右に展開。
中央のフレームの内側、ギヤ付きリンクに取り付けたキックばねの力で展開しています。 |
【シールドアーム】
特に深く考えずにシールド。
サーボ6個を連動させたシールドアーム。連動用のギヤなんかは前回の機体からの使い回し。
機構的にはただのヘッケンリンクです。機構的には揺動動作もできますが、実際にはプロポ側の設定で円運動の範囲でしか動かないようにいていました(ルール的にはOK)。
サーボはBLS177SVx6個で、これも前回からの使い回し。回転方向合わせるためのリバースの設定と、位置ずれを吸収するためにゲイン調整で柔らかめに設定しています。
重量の都合で付け根回りがヘロヘロで、結果的にこれが決定打を打てず勝ちを逃した原因になっちゃいました。
大会後にロッドアームに換装して試したところ普通に3.5kgの相手ひっくりかえせることがわかったりもしたので、今からしてみるとどーしてシールドにしたかなーと後悔しているところもあります。 |
【大会結果】
後日動画掲載予定。
【第一回戦第17試合:VS MURSAME】
試合開始直後、相手がリングの端っこで脚を踏み外して引っ掛かっていたところに歩いていってトドメ刺しただけ。
【第三回戦第9試合:VS 紅璃夢存覇死喪斗轟】
相手の電装系にトラブルがあったらしく、試合開始直前に大分苦労されていた模様。後で聞いたらバッテリーの端子に何かゴミが付いてたそうで。
最初相手が転倒復帰アームの誤操作で自爆してくれたのでそこに圧し掛かってればよかったものを、チャンスを見逃してグチャグチャやってるうちに引っかけられちゃいました。勿体ない。。。
「相手の電装系壊れるまで逃げ回ってればよかったのに~」(談・やまだーん塾長)
まったくもってその通り。。。
【敗者復活第三回戦第七試合:VS ラフィカ】
何度かチャンスがあったはずなんですが、アームの力不足でひっくり返せず。。
|
【特別戦】
久しぶりに選出して頂けました。
毎度のことですが、選ばれた理由を一言頂けるとアピールしやすくて良いと思います。
理想的にはインタビューアの方にCCDカメラでも持って貰ってピックアップした映像をスクリーンに出しながらやって頂ければいいんですが、さすがに無理でしょうね。。。
なお終わったあとで「カメ(※)を苛めちゃだめじゃないか!」と言われましたが、動画で見るとお分かりの通りで私はいじめてません!いじめてたのは童歌の方!w
※:空飛ぶカメ:リング中央からスタートした白いサーボ駆動の4足ロボ
動画提供:那須平蔵氏。感謝! |
【反省点とかいろいろ】
●THE・人柱。
時期的な都合や色々な背景があってモチベーション上がらなかったりして動き出しが遅かったりもしましたが、今年は片っぱしから色んな要素試す実験台にしよう!&そのために金突っ込もう!と開きなおってからは割と楽しんで作れたので良かったのではないかと思います。
戦績の方はイマイチでしたが特別戦にも出れましたし・・・
これといって壊れた個所もなかったので、ロッドアームに換装して学祭バトルか『のとロボ』あたりをターゲットに出てみようかと思います。 |
|