クシザシタロウXVで使おうとして失敗して、XVIから本格使用した足先構造。第19回では結構見かけたんですが、未だにオリジナルが誰だったのか判らないので●●脚とか言えない・・・スライダヘッケン、ってんでいいんですかね。
私の場合はカンタンク氏から会場で教わり、シクロ氏のブログで確認してから思考錯誤してこの手順にまとまりました。色々参考にさせて頂いた分は返さないと、ということで手順公開しときます。
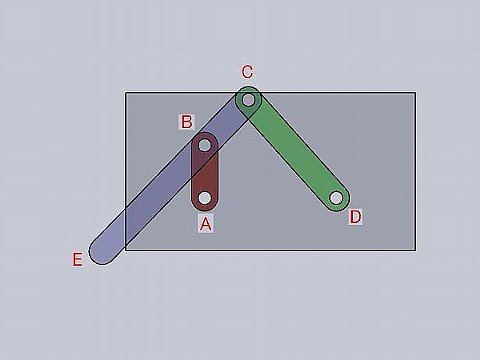
【4節リンク構造】
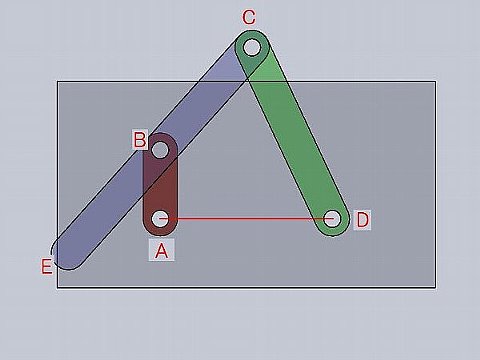
一番シンプルな4節リンク構造をこんな図で表してみます。
軸Aを中心にリンクA-Bが回転、リンクC-Dは軸Dを中心に往復運動。足先はリンクC-B-EのEの部分。
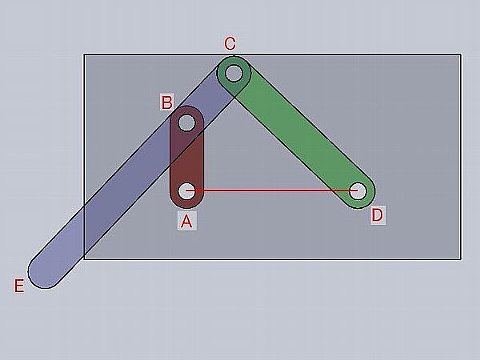
まぁヨーするにこういう感じで動きます。
こういう機構で上下動の発生しない足先を計算する方法とか公開していますが、これはまた別のお話。
【特殊な比率の場合】
4節リンク構造の中でも幾つか特徴的な運動を与える比率のものに名前が付けられてたりしますが、今回気にするのはこちら。
・軸間A~B = 軸間B~C
・軸間A~D = 軸間C~D
このとき足先EはリンクA~Bが180°回転する間、完全な円弧を描きます。ただし軸Aと軸Cが重なり、軸B、軸A、軸Dが一直線に並んだ姿勢が特異姿勢になるのであまり好ましくありません。
そこでこれをちょっとだけいじります。
・軸間A~B < 軸間B~C
・軸間A~D = 軸間C~D
ほんのちょびっとだけ、B~CをA~Bより長くします。
(図では判りやすくするためにやや多めに伸ばしています)
こうすると特異点に入らなくなるので接地部の両端での動きが滑らかになる半面、接地に使える範囲が狭くなっていきます。まぁ120度対向×3枚構成でやるなら接地範囲120°あれば足りるわけですが。
ここからがポイント。
まず足先を含む部品を軸Cを中心とした円板にします。
つまり、こう。
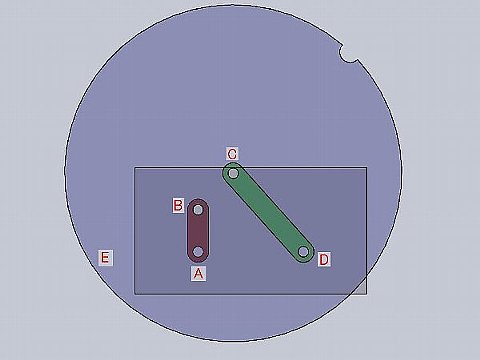
一部凹が付いてるのは、回転しているのが見えるようにするため。
いきなりぶっ飛んでるように見えますが、単に棒状だった脚を巨大な円にしただけです。なので、動き自体は変わりありません。
次が最後のポイント。
上図で足先部品を基準にみると、軸Dは軸Cを中心とした円弧上を動いて見えます。なのでそのライン上に溝を掘ると、こんな感じになります。

溝の両端がどこになるのかは各軸間距離によって計算されますので、頑張って計算するか実際に動かしてみて止まるところを探してみてください。
この状態で軸Dに固定軸を通し、リンクC~Dを外しても同じ運動が得られます。
すると軸Cそのものも必要無くなるので、そのあたりを丸ごとリンクA~Bに置き換えることができます。
というわけで今までリンクA~Bだったものを、軸Bを中心とした円板に置き換えます。
こうすると足先構成部品は丸穴と円弧状の溝が付いた円板になります。
(丸穴の中心は軸Bだったところ)
というわけで構造はここまで。
作り方は結構人それぞれなところがあるのでこれが最適解とは言えませんが、わりかし簡単な割に効果大な足先なのではないかなーと思います。
極めて単純な円と円弧だけで構成されてるので実はNCすら必要なく作れちゃいますが、足先構成部品と原動軸になる円板、円弧溝の中に入るスライダの間はそれぞれベアリング必須です。一応すべり軸受けとかでも代用は不可能ではないですが、かなりコジりやすいので念入りにアタリ出しをしないとまず間違いなくどこかで詰まります。
クシザシタロウXVIの場合は円板には大径薄肉ベアリングを、円弧溝の中には小径のミニチュアベアリングを二個仕込んでいますが、それでも念のためクレ556吹きかけながら1時間以上回し続けたりとかやってます。
あと多くの人に言われましたが、円弧溝が歪んだら一発でアウトです。
私の場合は足先自体をA2017の5mm厚、円弧の外側も肉厚を増してアーチ状構造にした上で機体全体の柔軟さ+足先ゴムで何とか曲がるのを避けているので、そこが歪む前に機体の他の部分がぶっ壊れるなり吹っ飛ばされるようになってます。
|