かわさきロボット競技大会の機構でよく話題となる”移動する際に上下動が発生しない足先”を、Excelで計算できるようにしてみたものです。
私の機体だとXXタロウIX、クシザシタロウXII、クシザシタロウXIIIなどの足先計算に使ってます。
1.対象となる構造
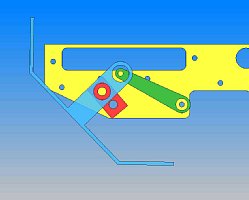
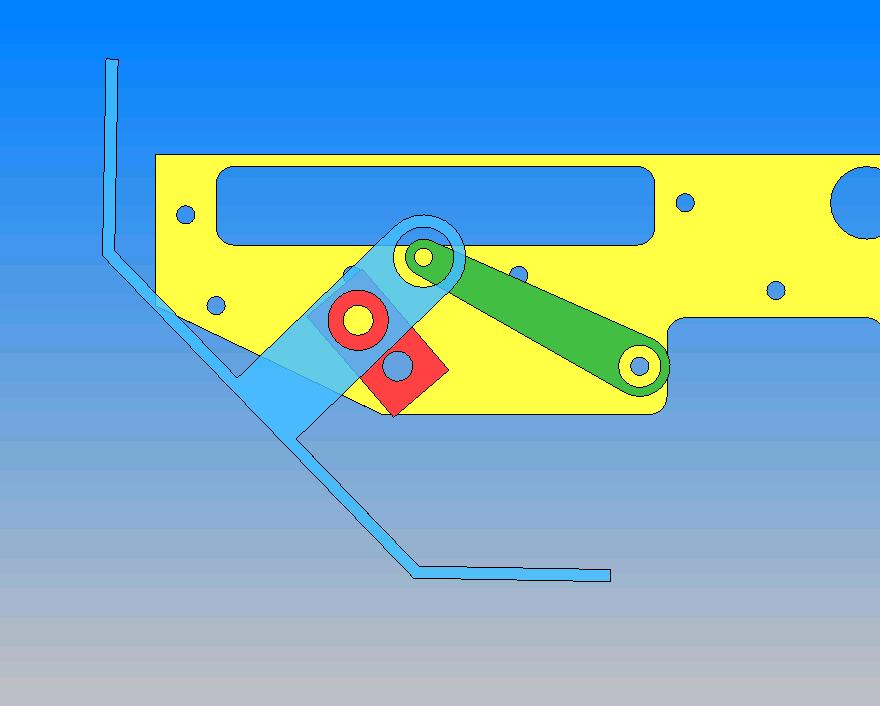
基本的にこのツールはこのような4節リンクの足のための足裏形状を作ることを想定しています。
画像中央の青丸が動力が伝達される原動軸の入る部分で、赤がクランク(原動節)。
その先に繋がる水色のリンク(第2リンク)が地面と接触する足先を持つ部分で、緑色のが揺動リンク(第3リンク)です。
2.クランクの運動の計算
原動軸の位置を基準とするので、原動軸のX座標(原動軸x)は0にします。
好きな値を入れても計算はできますが、あまり意味が無いです。
Y座標(原動軸y)は上下動が無いと考えた時の地面から原動軸までの高さ。希望の数値を入力して下さい。
原動節長はクランクの長さ。これも希望の数値を入力してください。
以上で原動軸の位置が決まりました。
これらの情報とクランクの回転角度(入力角度)から、原動軸を回した時のクランクの出力軸の位置(原動軸端x,y)が計算されます。
3.第2、第3リンクの運動の計算
第3リンクの片方(頭上右側)の軸はどこか(胴体とか足全体のフレームとか)に固定されています。
この位置(第3リンク固定端x、y)も好きに決めていいので適当な値を入力します。
また第2リンクの片方の軸穴はクランク軸に繋がっているので原動軸端x、yに一致します。
(なので表示は原動軸端x、yで兼用しています)
第2リンク長は第2リンクがクランクと繋がる軸から第3リンクに繋がる軸までの距離です。
ここも任意の値が入力できるので適当な長さを入力してください。
第2リンクと第3リンクの繋がる軸の位置(第2リンク端x、y)は、次の2つの円の交点として自動的に計算されます。
・原動軸端を中心、第2リンク長を半径とした円
・第3リンク固定端を中心、第3リンク長を半径とした円
2円の交点なので解は普通2個存在しますが、基本的に片側だけが出力されるようになっています。具体的な計算方法は興味ある人だけセルの中身読んで下さい。
入力が必要な項目は以上で終了です。
これだけ入力すれば後は勝手に表示してくれると思います。
入力が不適当な場合でも特にエラーを吐くとかいう機能は全然無いので、表示にご注意下さい。
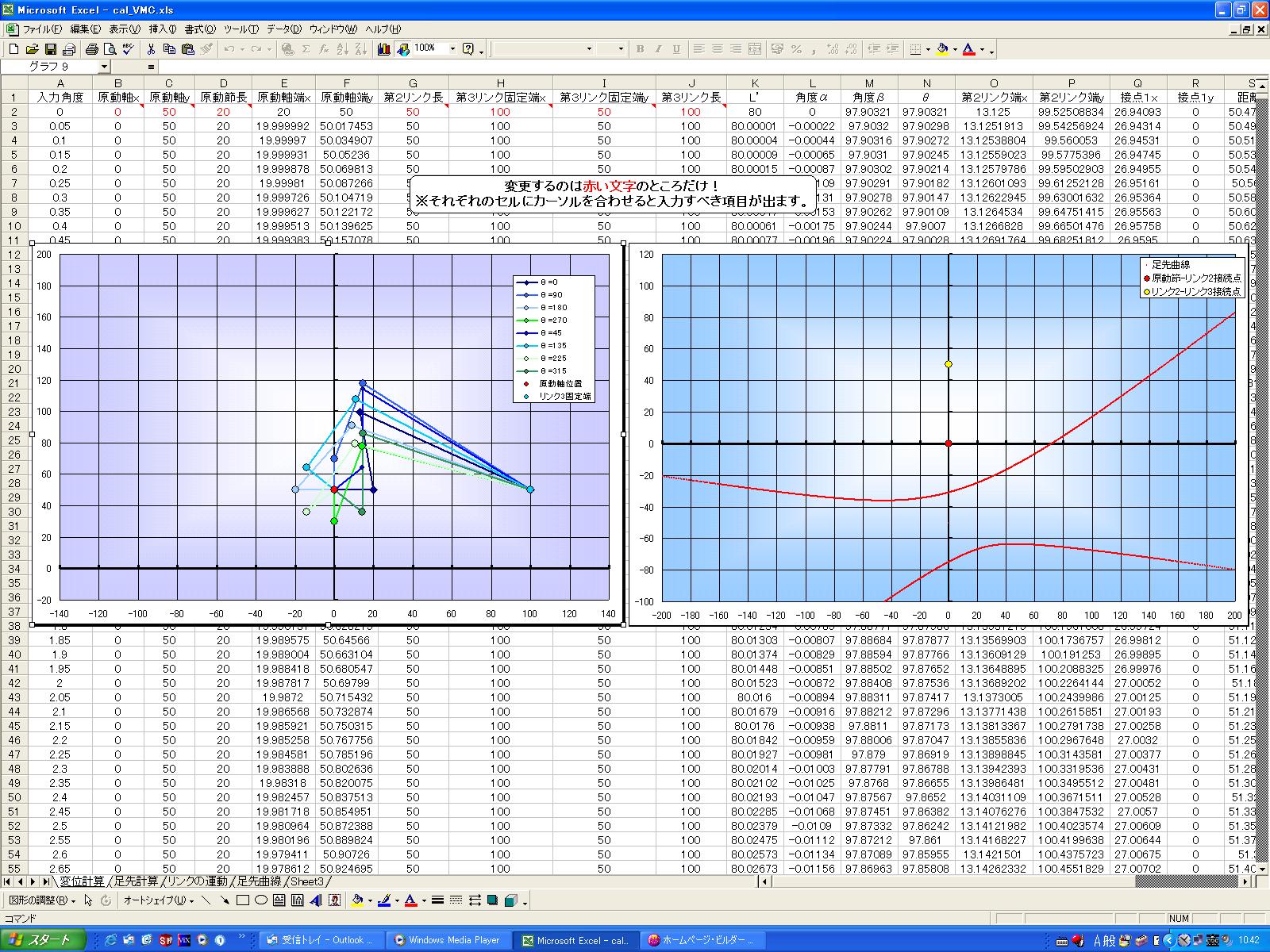
4.出力される図入力終了時のシート「変位計算」の画面です。
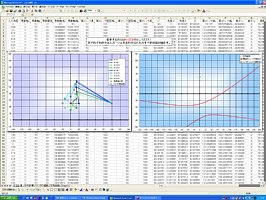
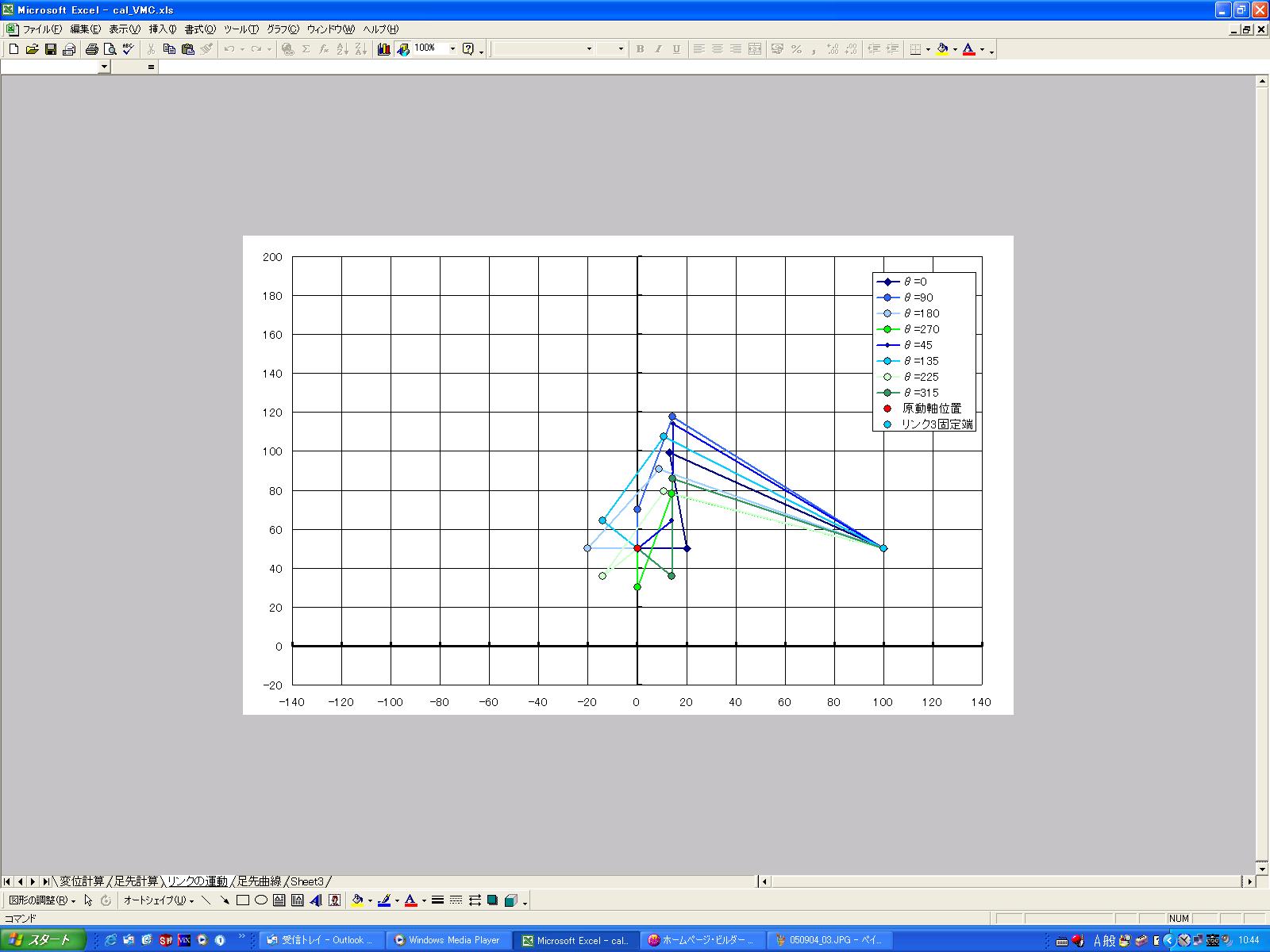
左側の図が、クランクを45度ずつ回した時のリンクの運動の様子で、シート「リンクの運動」はこれを抜き出したものになります。
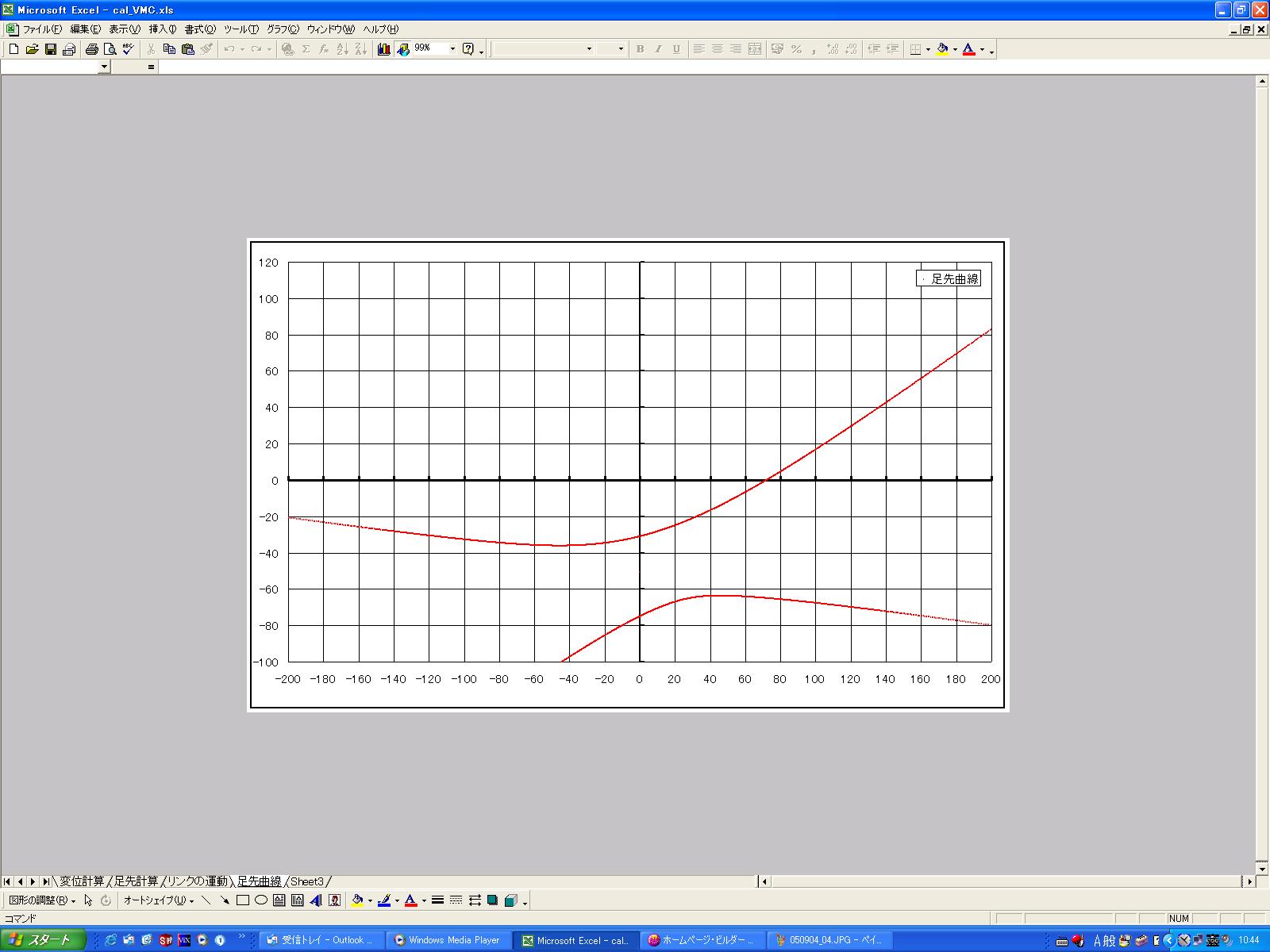
右側の図が求める足先曲線で、シート「足先曲線」がこれと同じものになります。
<リンクの運動>
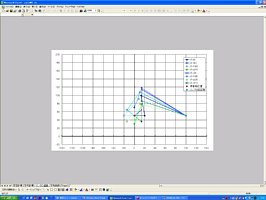
原動軸を45度ずつ回したときの姿勢が表示されます。
ここで8本描かれていない場合は、計算できない結果=実際には構成できないリンク構造になっている可能性が高いです。
<足先曲線>
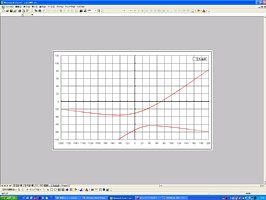
第2リンクのクランクと繋がる軸を(0,0)、第3リンクと繋がる穴を(0,第2リンク長)としたときの足先曲線を表します。
図上では上下に二本の線が引かれていますが、これはクランクを一周回した時の足先位置を表示しているためで、実際にはクランクが一周するうち歩行に使われるのはこの図では上側にある曲線になります。
残りの部分は足を上げて進行方向と逆方向に持ち上げている時のための足先曲線なので無視して下さい。
また足先曲線の端っこは計算上無限の彼方に吹っ飛んでしまうので、適当なところまででカットすることになります。
5,出力される数値
シート「足先計算」のx3、y3が足先曲線のx、y座標を表します。
この数値と曲線の図を見ながら、どこまでを足として利用するか考えます。
足の数が2本だったら180度分欲しいし、3本以上あるなら1本の足の分は狭くてよくなります。
クランクを0.05度ずつ回転させた場合を想定して計算しているのでデータ数は非常に多いです。
工作精度等を考えて、適当に間引いて使ったほうが賢明でしょう。
5,実際の足先の作り方計算された足先の座標をプロットし、なめらかな曲線でつないでやればできあがりです。
「足先曲線」を方眼紙上にプロット→材料に貼り付けて切り出し、延々とヤスリがけするだけでもある程度できちゃいます。
私の場合は次の二通りの方法でやっています。
・CAD上でこれらの連続した点列を通る曲線を描き、dxfファイルにして加工(またはアルミプラスに発注)
・CAD上でこれらの点列を表示し、それに近い円弧を適当に作製
最低8点程度でもある程度の足先は作製可能ですが、できれば20点程度以上欲しいところです。
前者の方法でやる場合は大体100点程度拾っています。
7.注意事項
よほど特殊なリンク(ヘッケンリンクとか)を作らない限り、足先曲線は左右非対称になります。
当然これを使った足先を使う時は取り付ける向きがあるわけなので、そこは間違えないようにしてください。
それとスライダクランク機構を使いたい場合は
・第リンク3長をとにかく大きくする
・欲しいスライダの中心を通り法線方向に第リンク3長分の距離の点を第3リンク固定端とする
という作業で近似的に実現できます。
第3リンク端の描く円の接線がスライダとして機能する、と考えてください。 |