第10回かわさきロボット競技大会参加機
XXタロウVIII
|

2004年夏、第11回かわさきロボット競技大会参加。
予選は3連勝(うち不戦勝1)、本戦第一回戦(VSアルカディア)敗退でベスト32.
♪ユニーク賞受賞♪
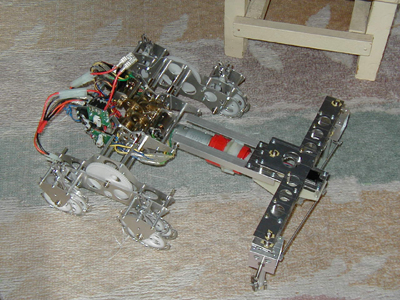
幅245×長345×高185mm、重量2910g(バッテリー抜き)。
背面部にバッテリーを1本又は2本搭載。 |
【機体の変遷】
第10回かわさきロボット競技大会参加申込書(機体概要)
2003年秋から設計開始、実は同年冬に『××タロウ8』としていったん完成。
その後大会支給ギヤボックス廃止という重大な規定変更や不具合の発生などにより改修、でも同じ月に開催された第6回ROBO−ONE参加機『Tia.』に時間と予算の大部分を食われ、足回り以外は突貫工事状態に・・・その割りに性能がいいってのはどーいうことなんだか。
『××』は機体の特徴が決まらなかったから・・・ではなくて『特徴が特定されないのが特徴だから』。足ユニットの構成部品は同じなので、それを組み替えて色んな機体を作れるようになってます。実際××タロウ8の段階では腕のバリエーションが・・・えー、4つかな?8.5でも2つ。一つは結構格好いいのになったんだけど、制作期間の都合で却下だったし。
凝りに凝った機体が作れないならいっそとことんスタンダードに作ってやろう、という思惑もあります。
『脚で歩いて』『腕で攻撃』で、腕は『ただ単に回転するものは禁止』という、かわロボの原則をそのまま体現したわけで・・・
でも何故か非常に特徴的な機体になって、挙句もらったのが『ユニーク賞』なんだからその意味では大失敗かも(笑
|
【タロウVIII(試作版)】
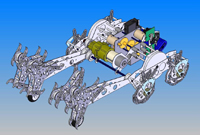
というわけで実はこれがXXタロウVIII。
03年8月の第10回大会終了直後に3DCADを私物として入手、それを使って設計した最初の機体(完成は激凸が先)。秋に非人道的な忙しさの仕事が入ったため作業できないのを見越してユニット式の組み換え可能な足用部品を外注、残りのフレームも極力工数がかからないように調整。
腕以外が完成したのが12月の終わり。悪い機体じゃ無いと思うんだけど、問題点もあったんだな。
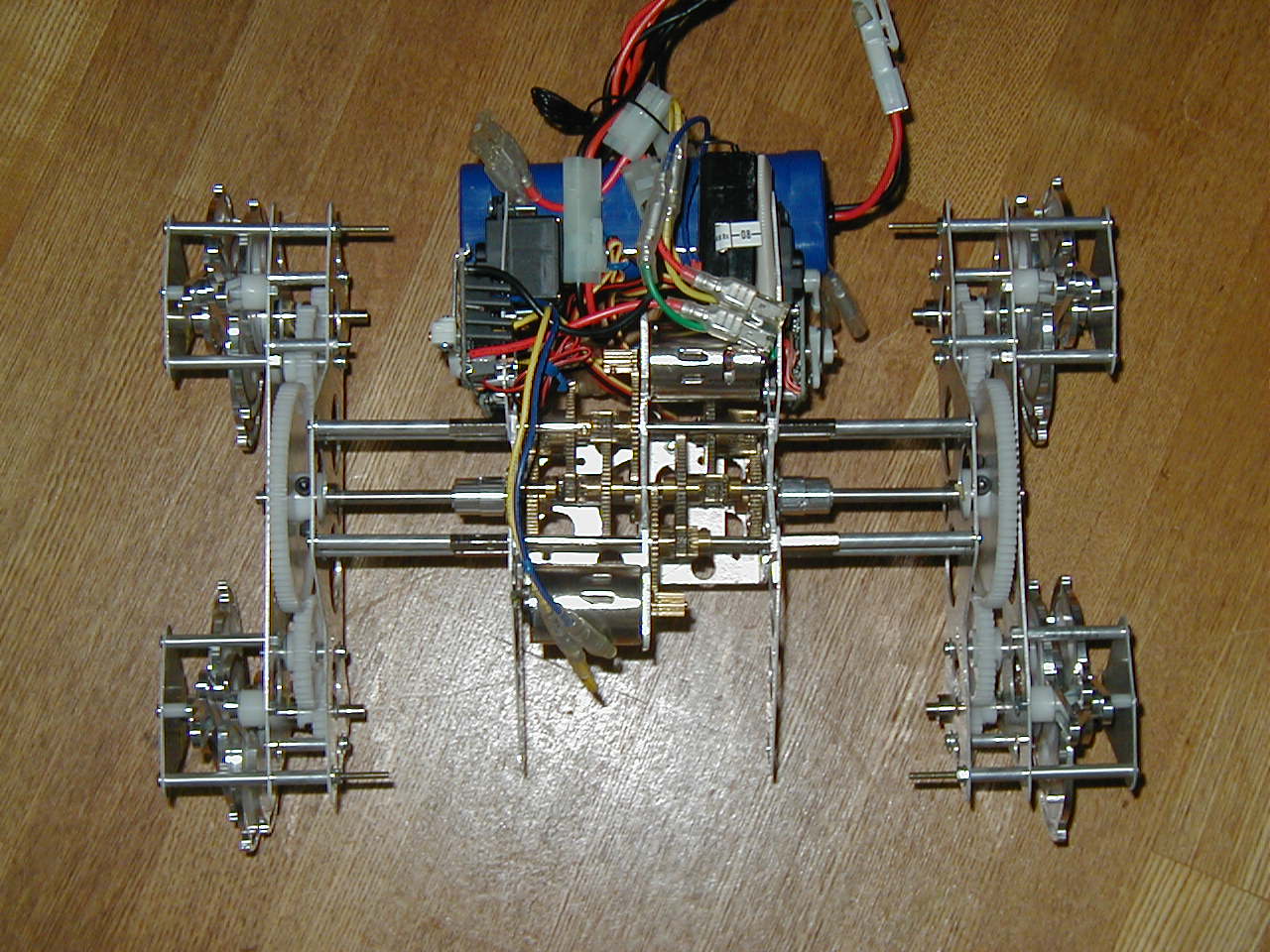
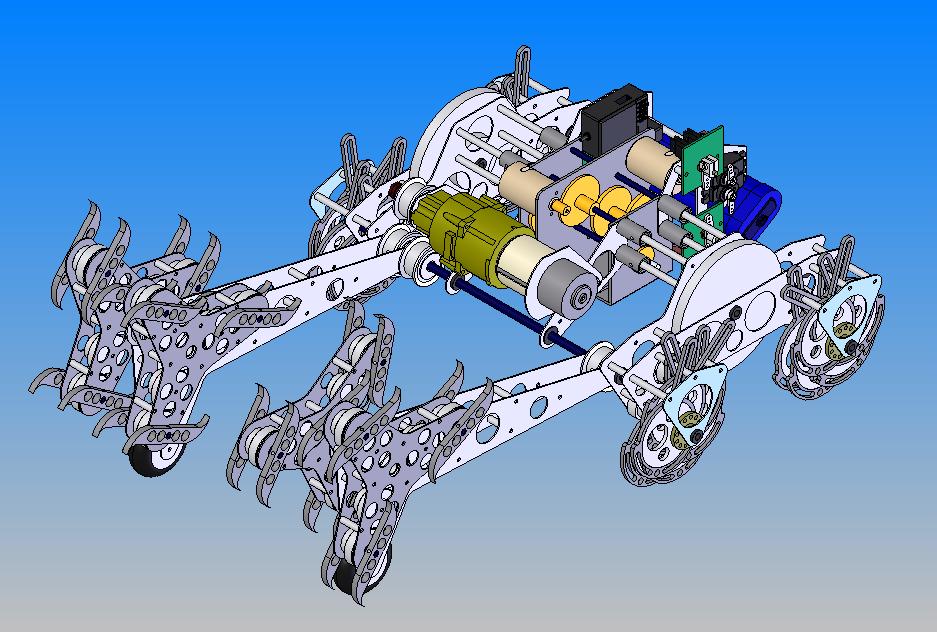
●足回り

かわロボの支給ギヤボックス廃止前に設計した機体なので中央にはあのギヤボックスがでーん。
両足にシャフトで動力伝達した先で4倍に増速してます。
胴体中央部の前方に出ているフレームは腕固定用のアタッチメント。


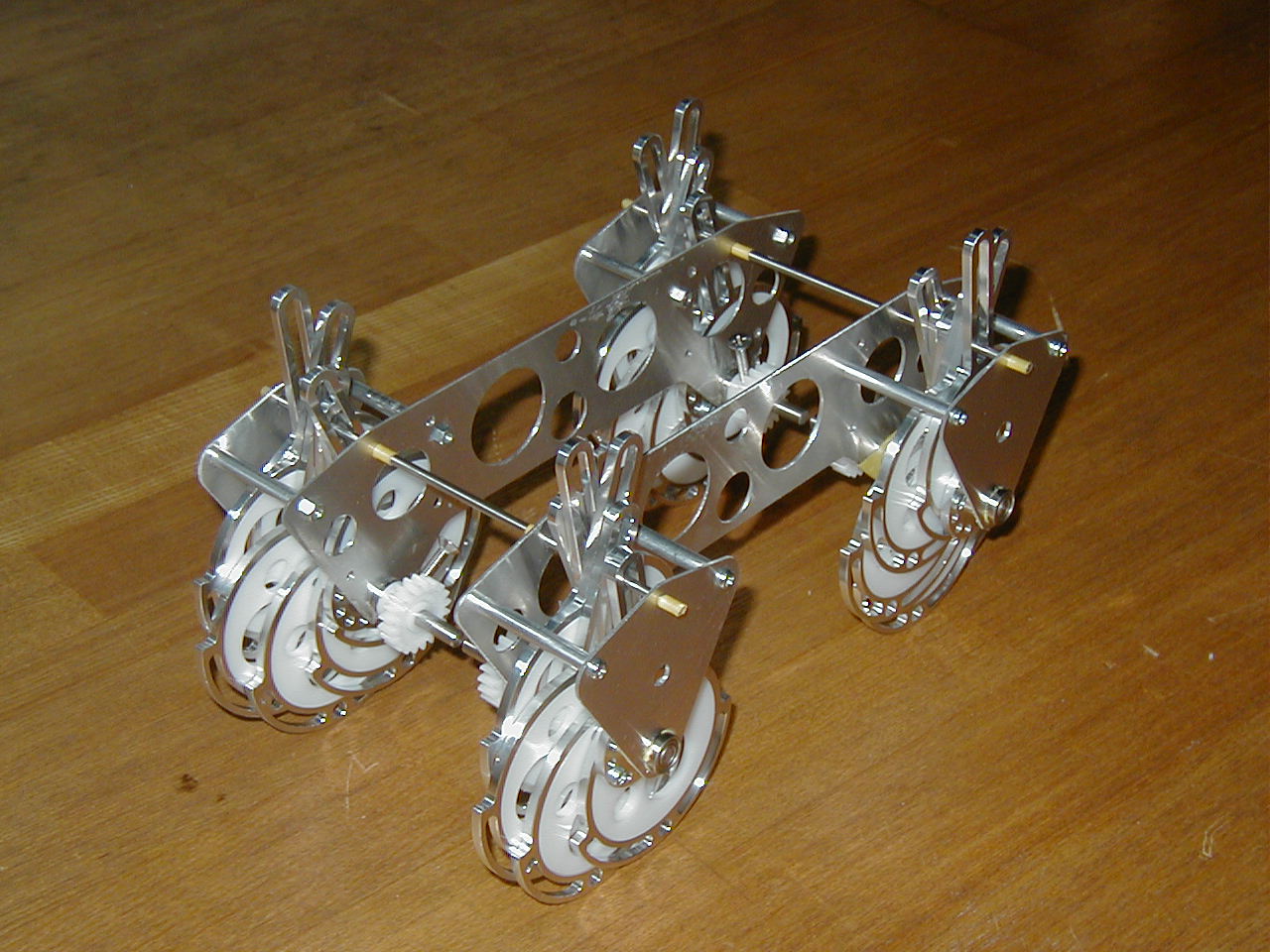
足のフレームだけ組んだところ。我ながらとても見事な仕上がり。
美しいフレームだ〜って書いたら「美しい!」とだけ書かれたメールが届いた(^^;
ちょっと数えにくいけど6枚ブロック×4箇所という構成になっとります。

外注部品一式(シャフト除く)。
お値段は〜ここでは秘密。
組立て後の調整時間に性能が比例する足回りをしていたんだけど、十分調整しなかったところからガタが発生。それとサスに相当するものが無いので固い床面上での高速走行がイマイチ。
一方ルール改定に伴い支給ギヤボックスが不要になったもので部品だけ流用して簡略化したのが『××タロウVIII』。なのでうちの内部での扱いとしてはこっちが××タロウ8.0で出場したのが××タロウ8.5になります。
バッテリーホルダまで作ったし重量・サイズ制限もクリアしてたし、本当にそのまま大会にも出せたんだよなぁ・・・ちょっと惜しかったかも。
フレーム自体はそのまま残ってるので足の部品さえ買えばまた同じ機体をそのまま作れます。
基本的に金さえ出せば誰でも作れるようになってるはずなんだけど、キット化して販売したら・・・
出血大サービスで一台25万、ってとこかな(笑)
●アーム
最初に公開したVer.1『似非カトレア』(笑
構造自体は悪く無いと思うんだけど、いかんせん重たい。
図面上で重量と強度の兼ね合いが取れなかったのでそのまま放置。
かっこよくて気に入っていたんだけど、もう一ひねり必要そう。
実際に作ったアームはこのver.2。
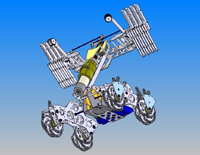
回転アームなんだけど、中央にあるサーボで回転面の向きを変更可能。
結構いい動きするんだけど、いかんせん幅が広すぎて中央が弱いというオチが。。。
設計のみのVer.3『百花』。
ユニバーサルジョイントのサンプルまで買ったんだけど、制作期間の都合で断念。参加申込書の概念図ではこの腕を使っていることに・・・
|
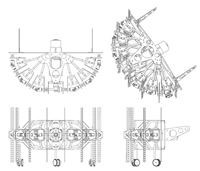
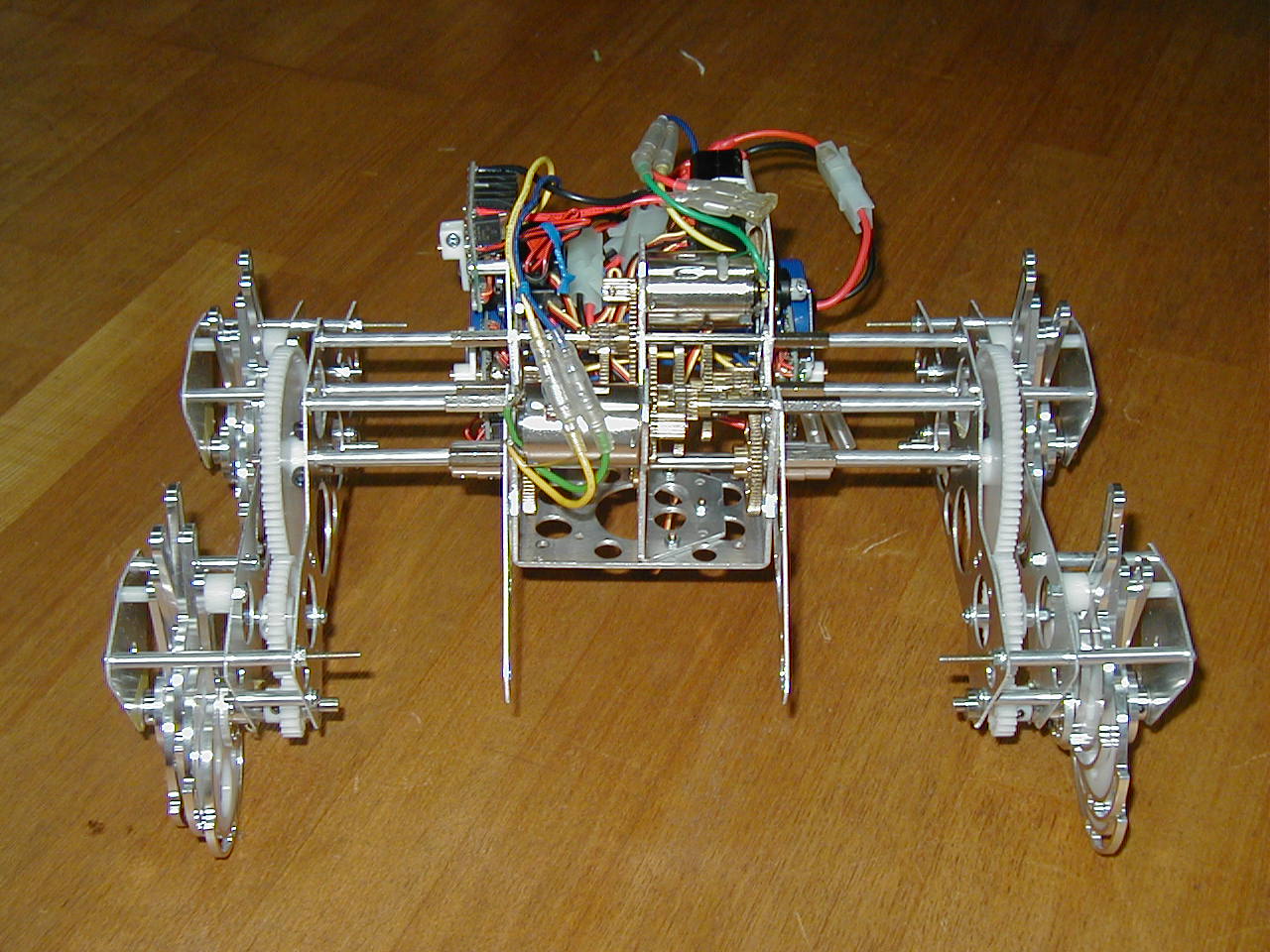
【タロウVIII(出場版)】
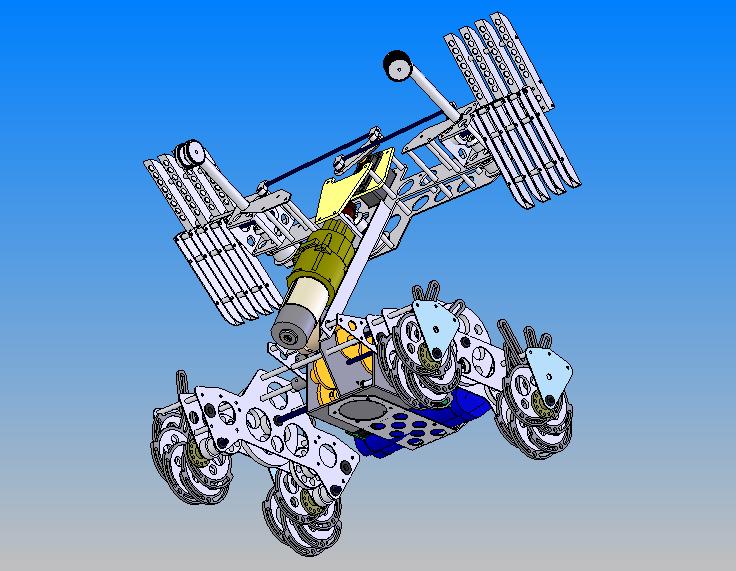
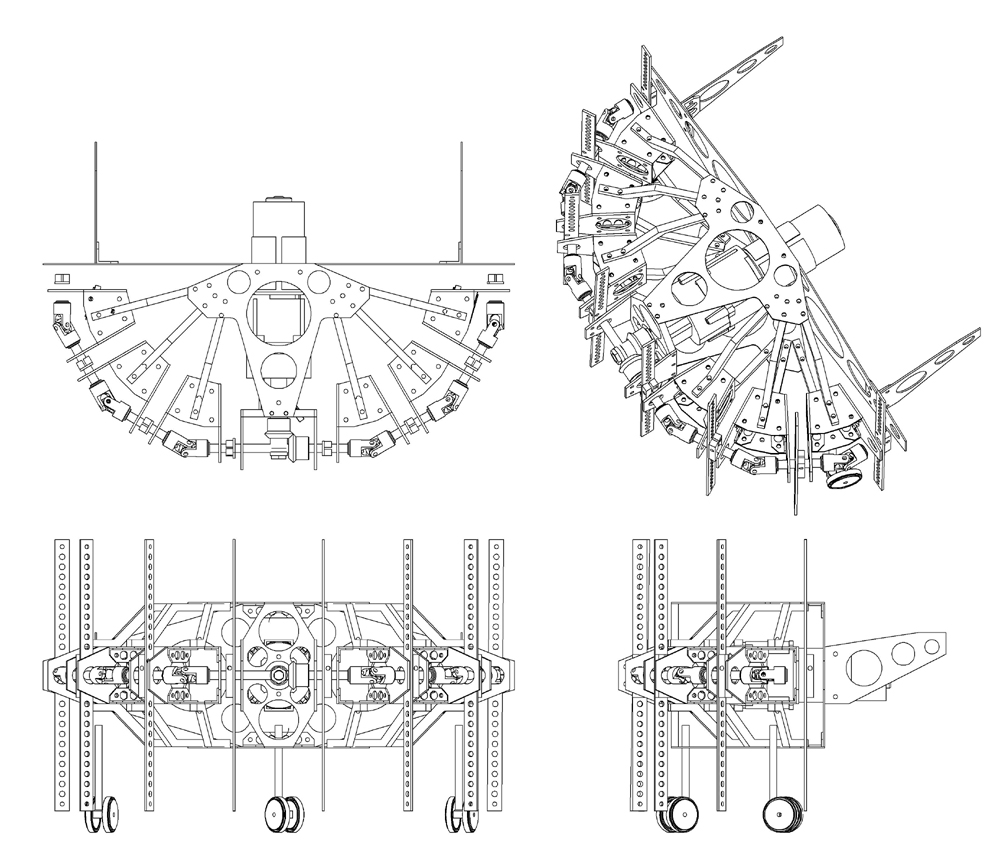
●足回り

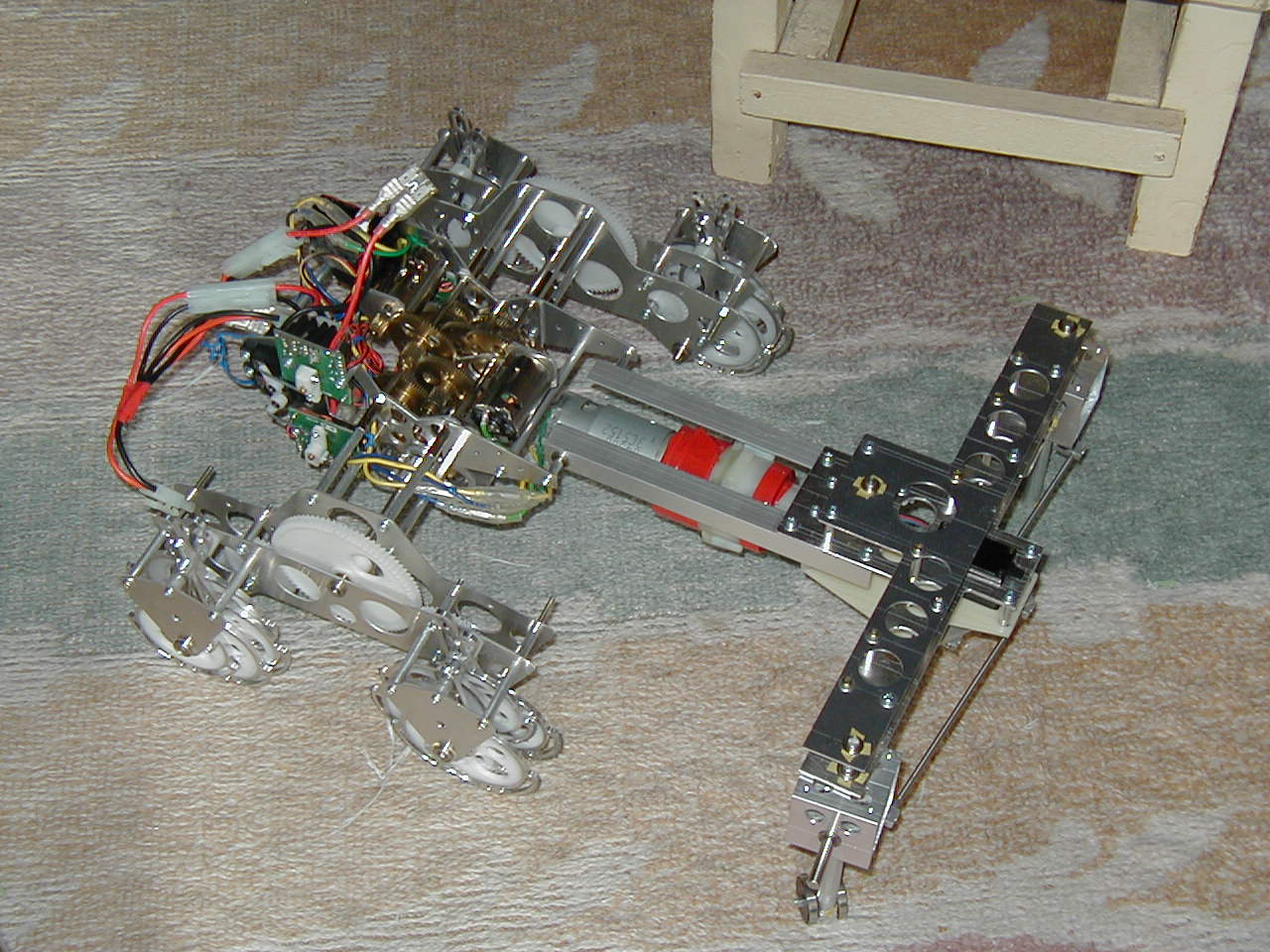
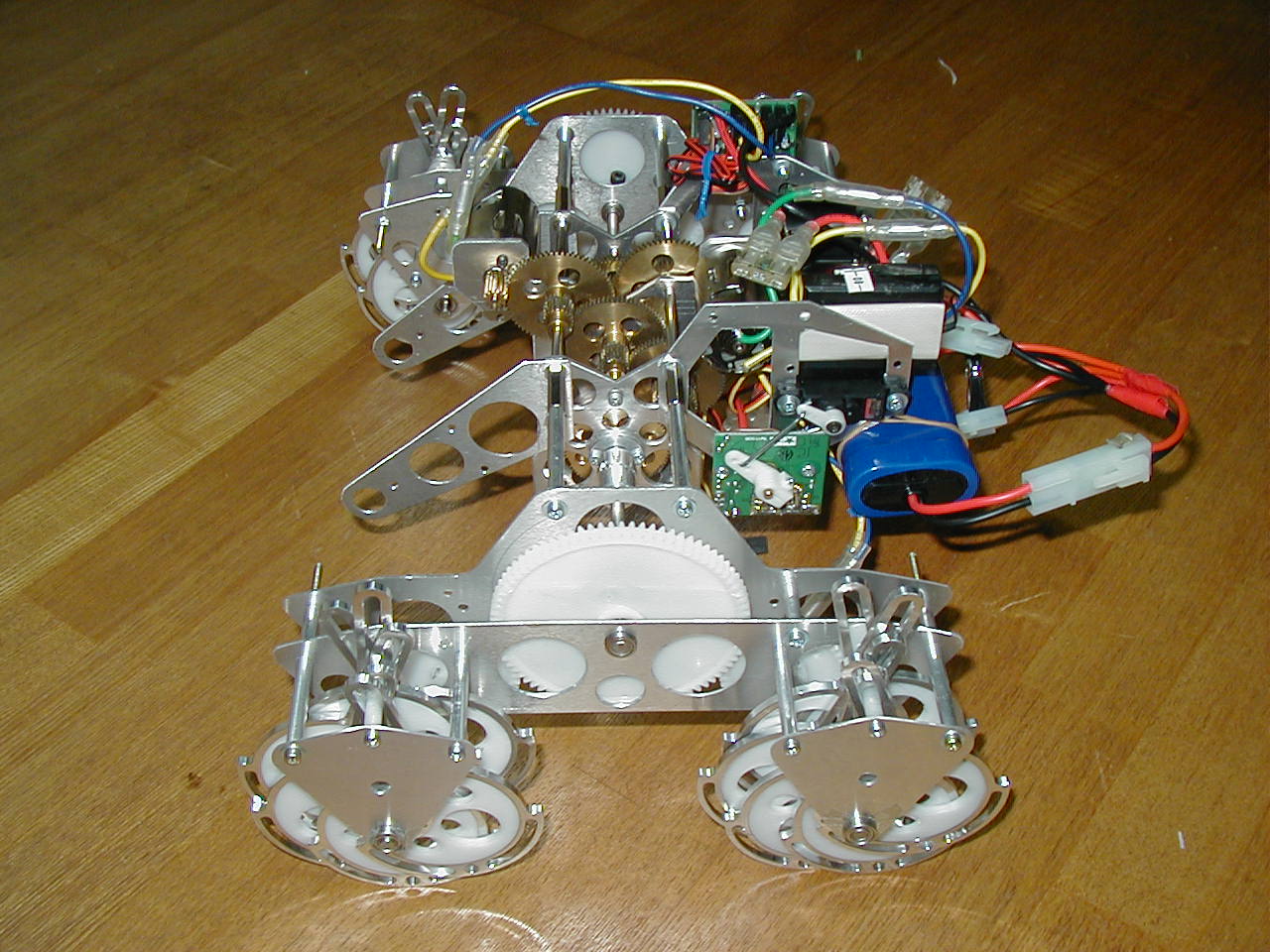
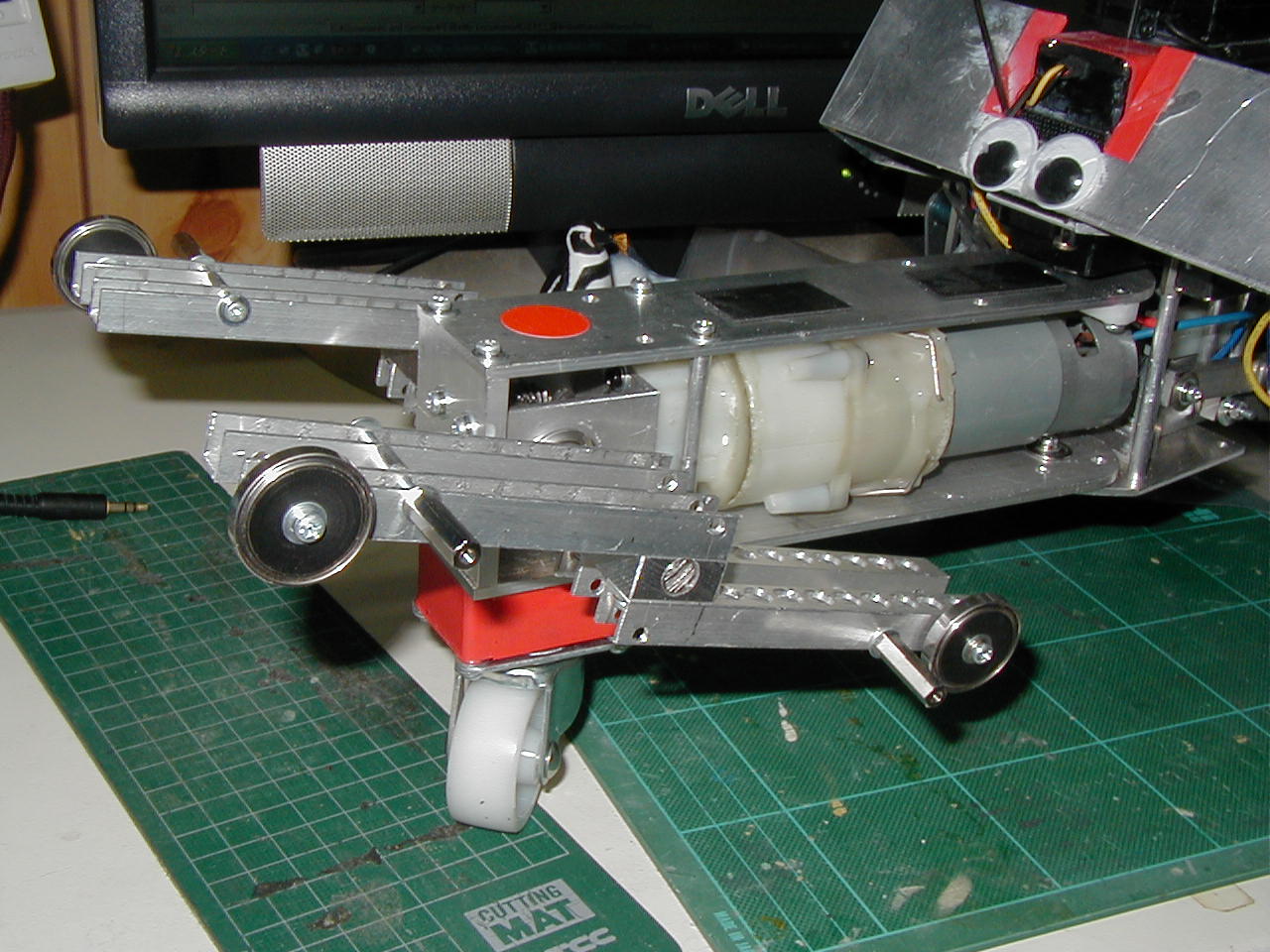
横から。
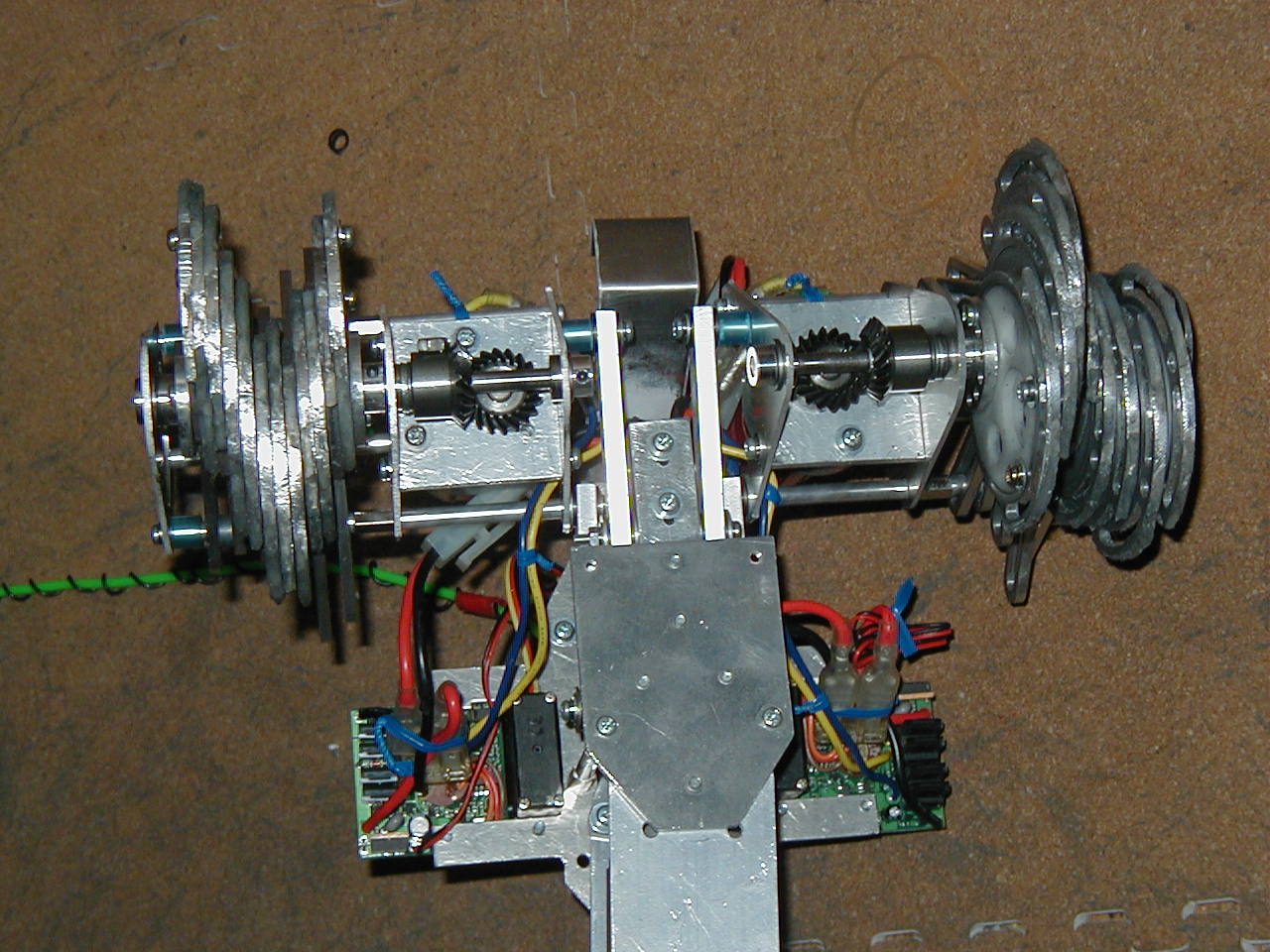
後ろから。

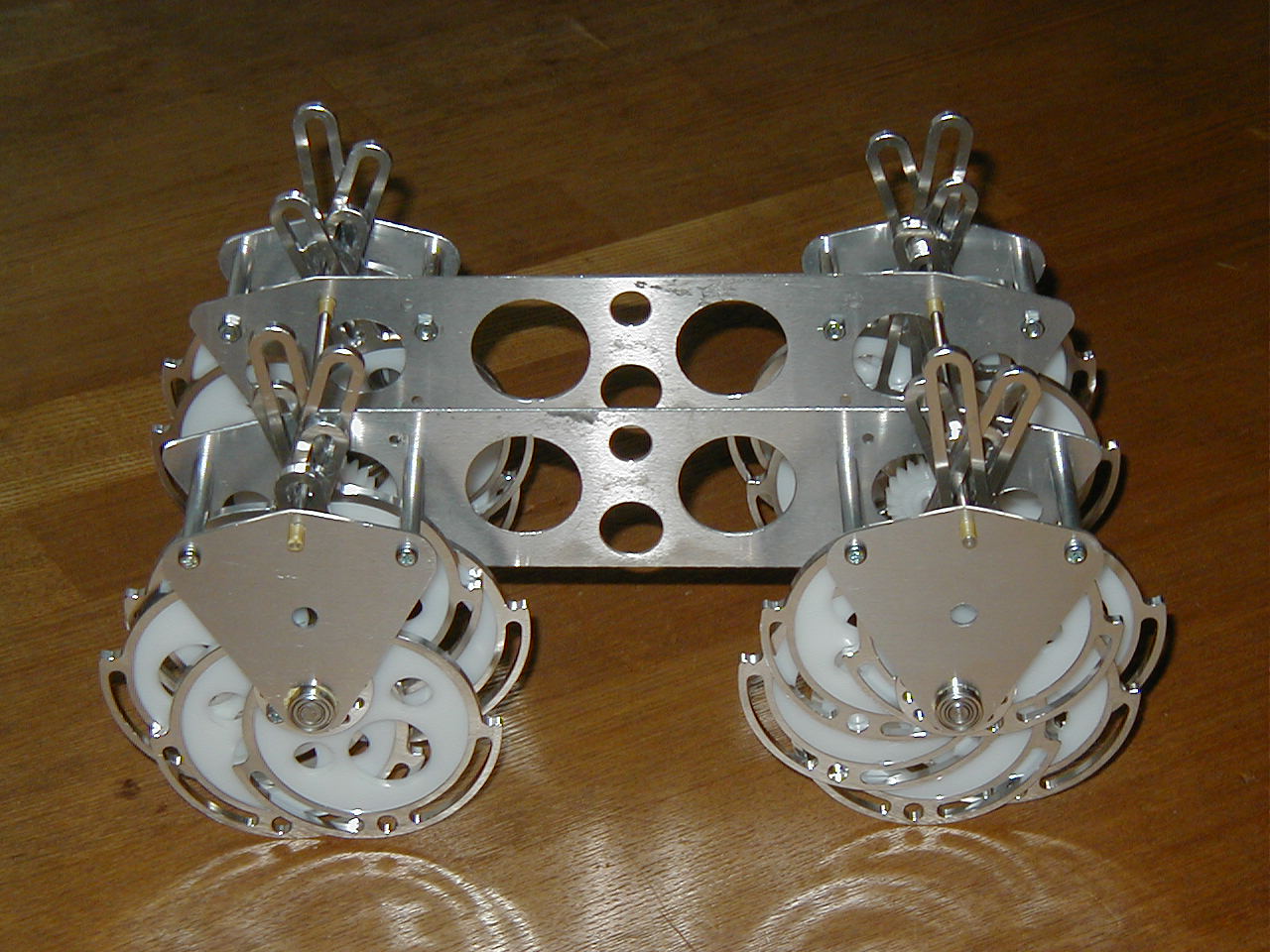
裏から。
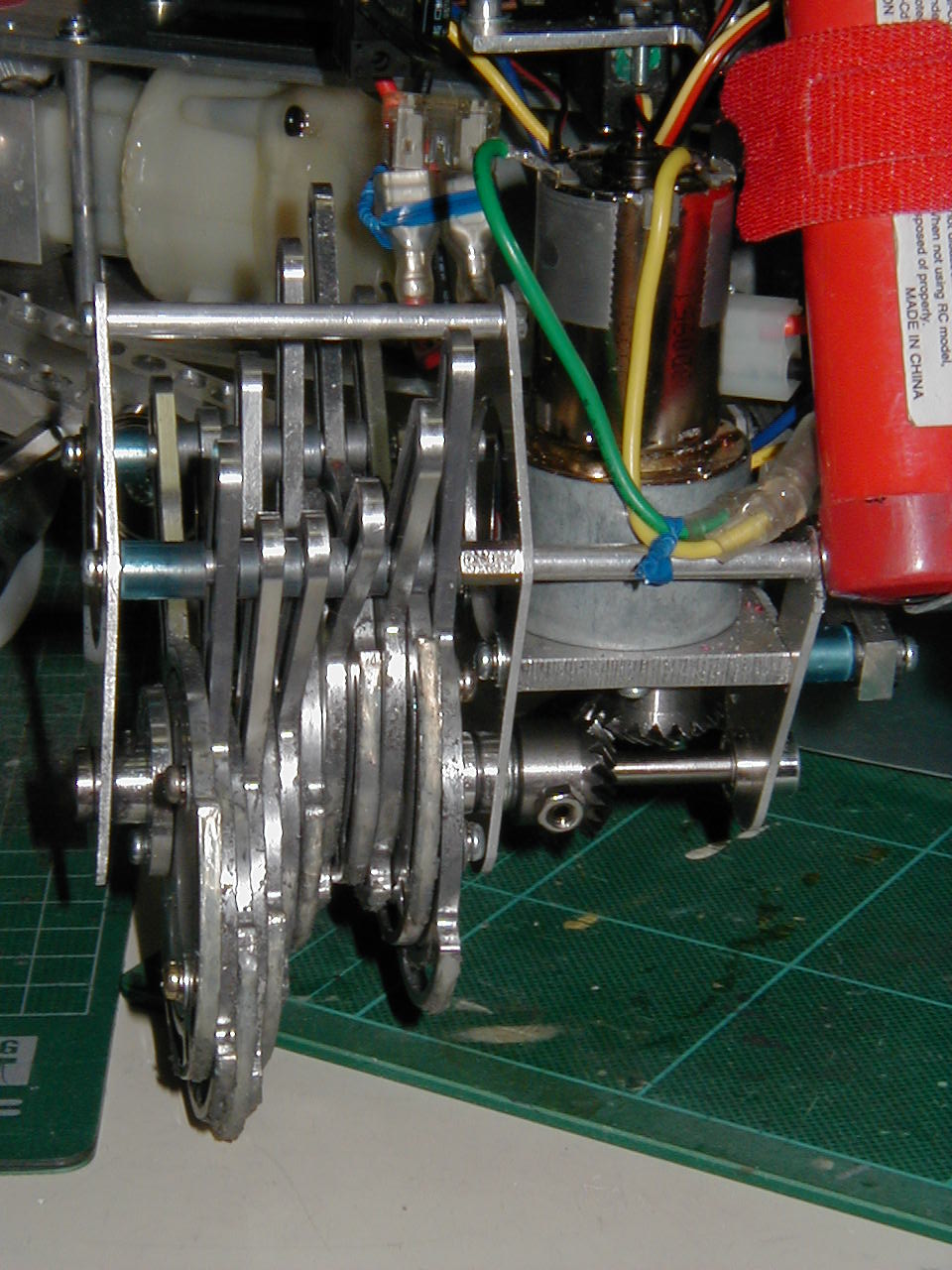
機構的にはタカアシタロウVIで採用したのと同じもので、スライダクランクのクランクに偏心円盤(ジュラコン製)を、スライダには脚板の上部にある溝を使用。また××タロウ8の段階では6枚組×4で使用していたのを、不具合の解消を兼ねて12枚組×2に。その際スライダの支点を前後に振り分けているので、ある意味6枚組×4といえないことも無いかも。
スライダの軸は前後の2か所にあり、6枚ずつ前向きに傾いたものと後ろ向きに傾いたものになっています。
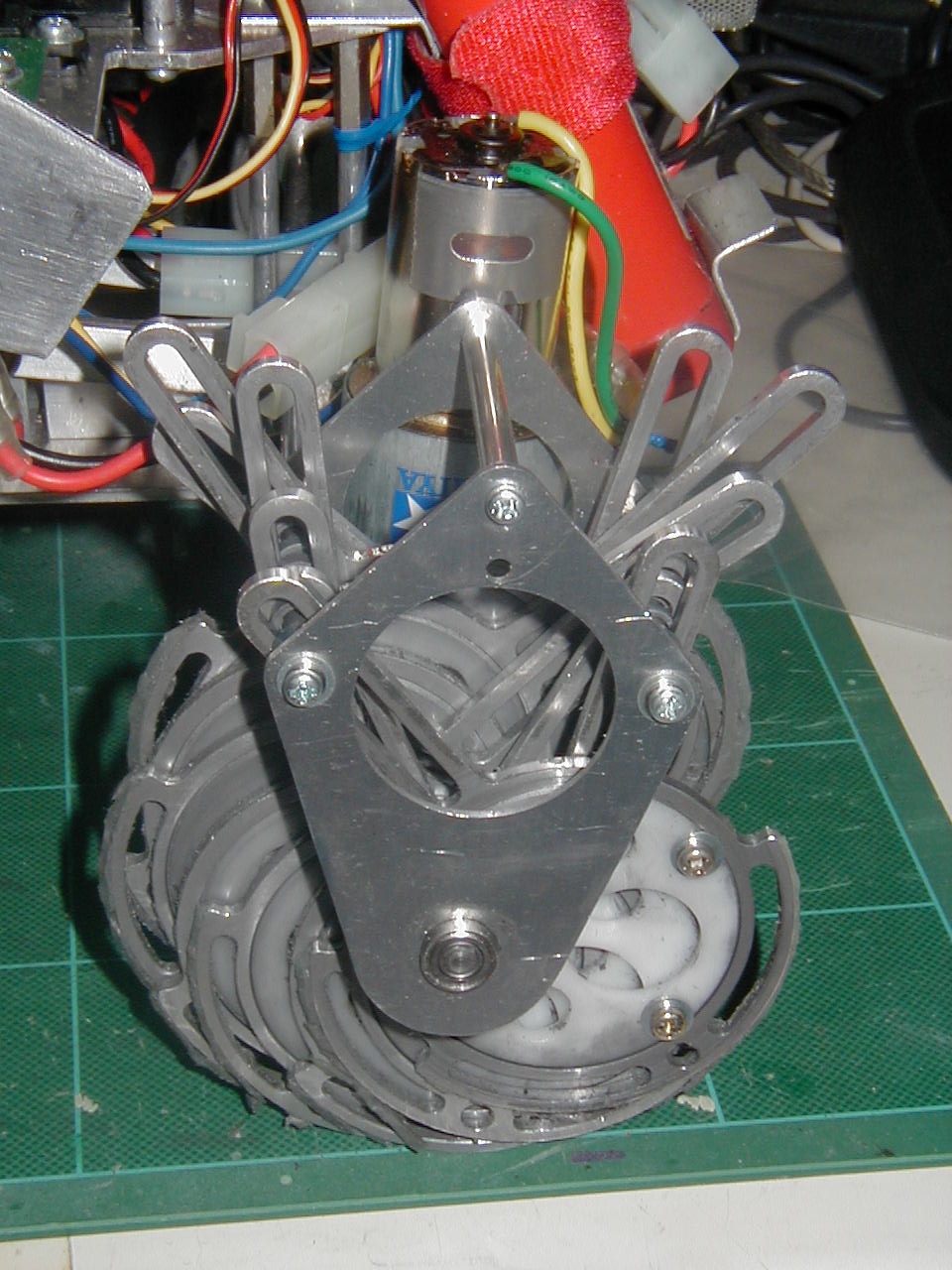
足の裏には滑り止めとしてコーキング材(セメダイン社シリコンシーライト)を塗り塗り。乾燥後も弾力性があるので、滑り止めというか衝撃吸収としての方が効果大。また速乾性で大体15〜20分で硬化するのでちょくちょく補修するのにも向いてるかも。あと330mlで288円(住商グレンジャー価格)と非常に安いのもポイント。
部品の加工それ自体は外注なので手間無し。材料費としてみりゃ高いけど、加工賃として考えたら格安というか価格破壊的だし。ただ組み立てただけだとあまり動きは良くなく、その後の調整が非常に大きくモノを言います。
この脚の場合だと、組立て後に慣らし運転を数時間ずつやってよーやく希望の性能を発揮。
ボール盤のチャックに入力軸をくわえて、556を吹きつけながら延々と回して回して回して・・・
こんなにしっかりやったのは初めてでした。でもそのおかげで故障知らず♪
●アーム

広告用カバーを外すと中には電動ドリルがデーんと(^^; それを傘歯車で回転方向を変えて連続回転アームに使用。定格電圧が12Vなのを7.2Vで回しているのでちょい弱め・・・一撃必殺、とはいかなかったか。
腕先端にはボールベアリングを装備。これが無いと当たった相手の胴体にひっかかって”持ち上げる”が”手繰り寄せる”になることも。”持ち上げて押す”ならそれでもできることはできるんだけども、”吹っ飛ばす”を目的とするならあった方がいいはず。
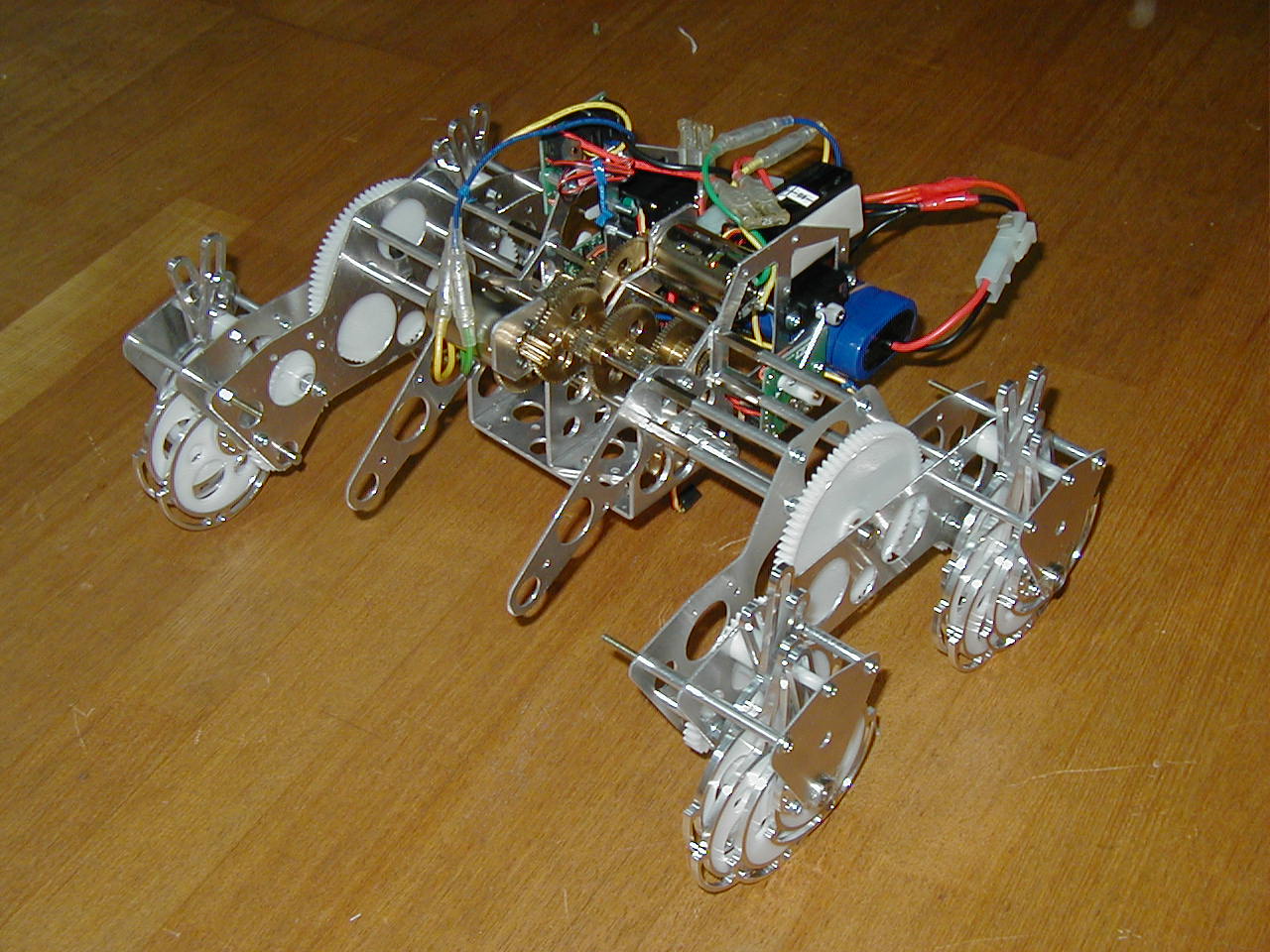
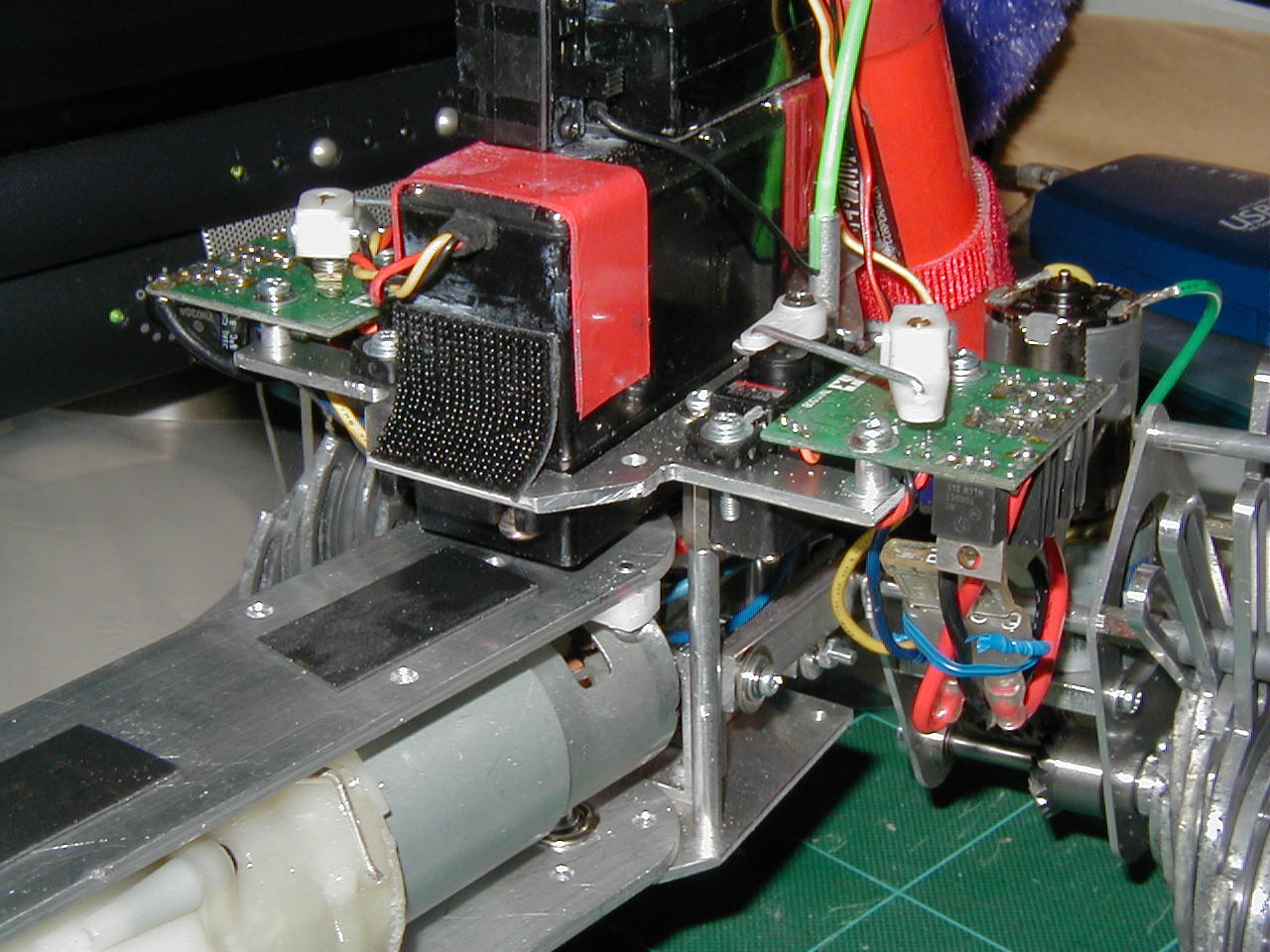
●胴体
中央上にあるのが首振り動作を行わせるための巨大サーボ(Hitech社805BB)。
その両脇に脚駆動用のスピコン、上面に受信機、背面に腕駆動用のアンプを搭載。

後ろにはバッテリーホルダ。
ここに2本のバッテリーパックを載せ、マジックテープ式の締結具でしっかりと固定。
重たい部品をここに集中することで重心位置を脚の近くに持ってきてます。
最初は腕の上にバッテリーを載せてたけど、その場合グリップが不十分で移動速度がイマイチ・・・ |
【試合結果】
予選第一回戦、VSアルシオーネ。
まっすぐ突っ込んで腕を回転させたらどこか変なとこにひっかかったようで、双方後ろ足で立つような感じに。向こうの機体が軽かったおかげで腕回したら倒れてくれました。思ったより(こちらの)腕が弱かった・・・
第二回戦開始前にトラブル発生。第三回戦の相手を決める試合に出る2チームとも棄権!というわけでこの試合勝った方が決勝進出じゃぁぁぁ
で、予選第二回戦、VSJECHR-RCC・・・あれ、横回転アームだったような。
相手のアームがHITしたんだけど、まぁ冷静に対処すりゃなんとかなりますわな。半ば相手の自爆気味に勝ち。
予選第三回戦、VS・・・誰ってことになってたっけ。とにかく相手がいないので、走行審査だけしてお終い。この『不戦勝確定だけど走行審査』、一部審査員にやたらと不評だったようで・・・
とにかくこれにて予選突破決定!で、決勝トーナメント初戦の相手がアルカディア。
資料が無いなぁ・・・と思っていたらなんのこっちゃないアルテマじゃないか。はっはっは。
・・・勝てるかってんだバカヤロー。。。
前日は未完成で脅威の全方向移動ができなかったらしいんだけど、当日の朝に完成したとのこと。それさえなきゃまだなんとかできたかもしれないけど、完璧な状態ではとてもとても・・・
たとえ勝っていたとしても次の相手はカトレア、その次は女王様・・・って、オイコラ。
今回のこのトーナメント、見た人なら「くじ運悪すぎ」と言って誰もが納得してくれるだろう。
別にBリングの方が弱いとはいわないけど、まだ戦えそうな気分になれるんだもんなぁ・・・はぁ。
閉会式での佐藤実行委員長の講評で「タロウのような変わった機体も・・・」と名指しで来られてかなりびっくり。その後Jr.大会の表彰で来ていた子達に操縦させたり、ジャンボ6号と戦ってみたり。そうそう、ジャンボ6号に吹っ飛ばされた唯一の機体にもなりました(笑)
|
【反省点】
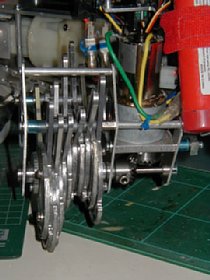
●この調整方法をマネするときは・・・

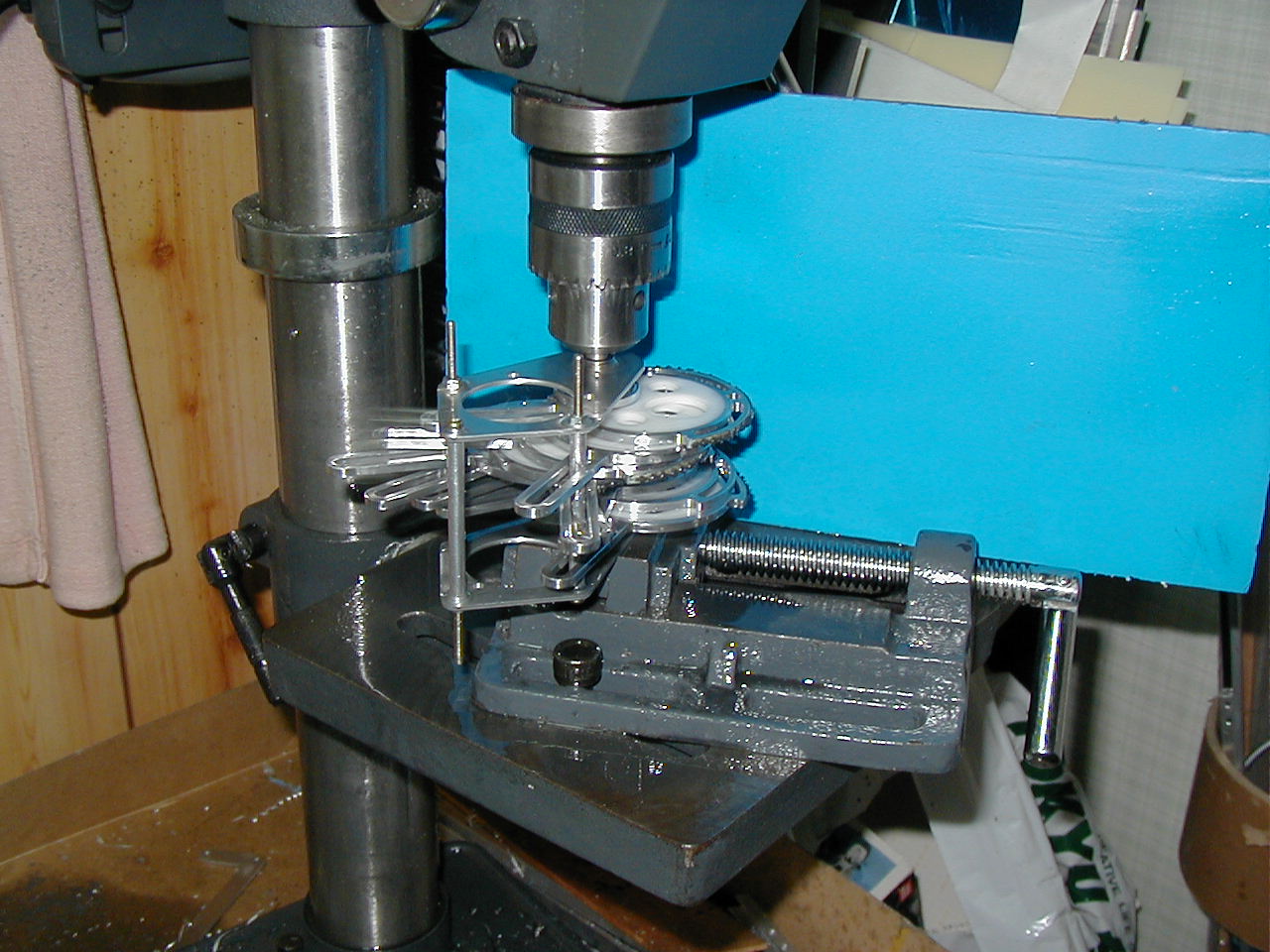
問題の調整作業中、というか足回りのアタリ出し作業。
ボール盤に入力軸咥えさせてバイスにフレーム側を固定、556を大量にぶっかけた状態でぶん回すことウン時間。556を吹きなおしても汚れが出にくくなってきたら完成です。
この作業をやるときは周囲に飛散防止の壁をお忘れなく!
奥の青い板が実は飛散防止カバーを外した残りで、実際にはぐるっと覆った状態で作業しています。
その外側の安全地帯で本読みながら完了を待っていたわけで、それがないと部屋とかその他が大変なことになります。
|



{kind=link}
{kind=link}