第13回かわさきロボット競技大会参加機
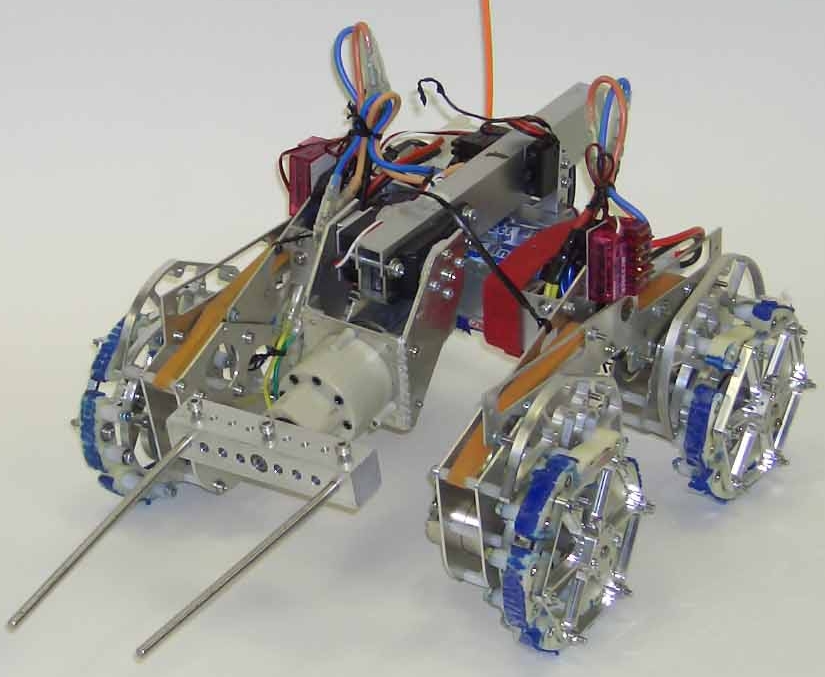
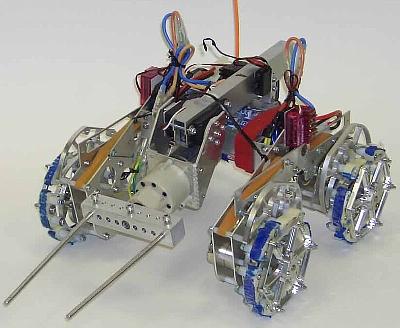
タカアシタロウX
|
・・・タカアシです。 |
【機体の変遷】
第13回かわさきロボット競技大会参加申込書(機体概要)
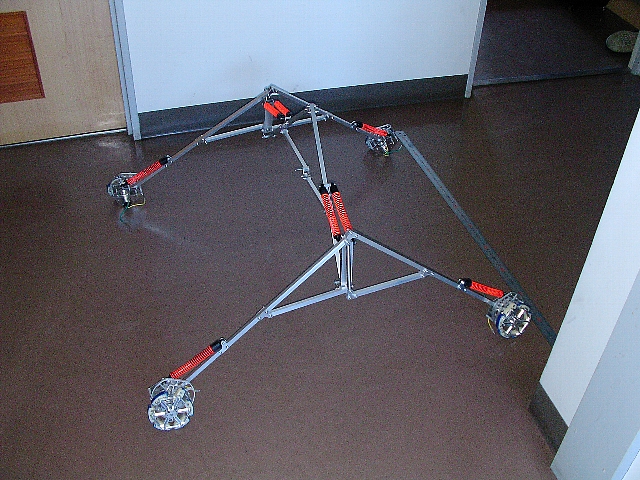
上の写真の一週間前はこんな↓でした。
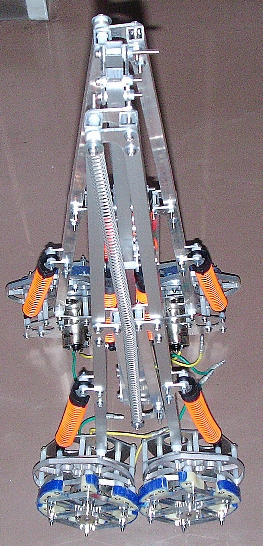
さらにこれをたたむとこんな感じに。
ここまで作っておきながら、ほんのちょっと重量オーバー。学生時代だったら一気に軽量化してられたのかもしれないけど、仕事の都合上とてもじゃないがそんなことやってる時間も環境もなく。。
仕方ないので棚の中に眠っていた××タロウ9を引っ張り出し、おもむろに足ユニットを完全に分解。さらに上の写真の状態から足先ユニットだけを取り出し、足ユニットのところに無理矢理取り付け。
こんな作業ができるあたり、足先のユニット化という点ではほぼ成功していたと言えるんじゃないだろーか。
|
【足先}

これがその足先ユニット(足先はケミカルウッドの試作品。後に強度不足を理由にABSに変更)。
「第13回大会でルール的に最も”黒い”足」の座をモルダウ氏の団地妻排球部と争っている・・・私としては乾杯な気でいるんですがぁぁ。

これが足先の軌道を決めているガイドになる部品を正面からみたところ。
最初は完全な溝カムになっていたんだけど、よくよく考えたら溝の側面のうち片面しか有効に機能していないことがわかったので、反対側の面を削除した結果がこれ。
下側の部品の外周が溝の内側の面で、足先が円軌道を描くのに使っている部分。
上側の部品の外周が溝の外側の面で、足先のブロックが60度公転する間にブロック単体は300度自転するというシロモノ。
原理的な参考品は東工大ロ技研のLimitCycleシリーズから。かわロボ参加者にはリミットカズラの方が通じるのかな?
考え方は同じだけど、溝の形状等は完全にオリジナル。この形状になるまで相当に時間がかかった・・・5月中に一回完成したものの、B予選の内容に併せて速度UPを図らなくてはならず、そのため全面的に再設計。これにやたら時間がかかってしまったのが、最後の開発期間不足の原因じゃないだろーか。。
動きとしては期待していた以上にいい調子だったので、その点は非常に満足。ただ足先にあるカムフォロアに相当するベアリングを支えている軸がM3のねじになっていて、その強度が結構重要になっている。普通の鉄ねじだと最高速で回転させた時衝撃でj変形してしまうので、急遽全てステンレスねじに交換。調子が悪くなったり折れたりしてもすぐに交換できるようにしたので、交換手順さえしっかり把握していればそれなりに使えるユニットになった。
本当はモータの周囲を足が回るようにしたかったんだけど、ギヤユニットを設計している余裕がなかったのでタミヤのギヤドモータを使用。機能的に致命的な問題は無かったけど、効率を考えるとやっぱりもっとモータを埋め込むような形状の方がよさそうではある。
あとモータx4はやはり重いわ。。 |
【反省点】
●横回転アームを使うときは自爆防止アームをつけよう。
結局敗因は100%自爆だった。。
ソンナコンナデタカアシタロウX、
コンナナリデモタカアシタロウX、
去年ヨリ2cmクライタカアシタロウX。
身体的特徴で機体を差別しちゃいけませんね、はい。 |