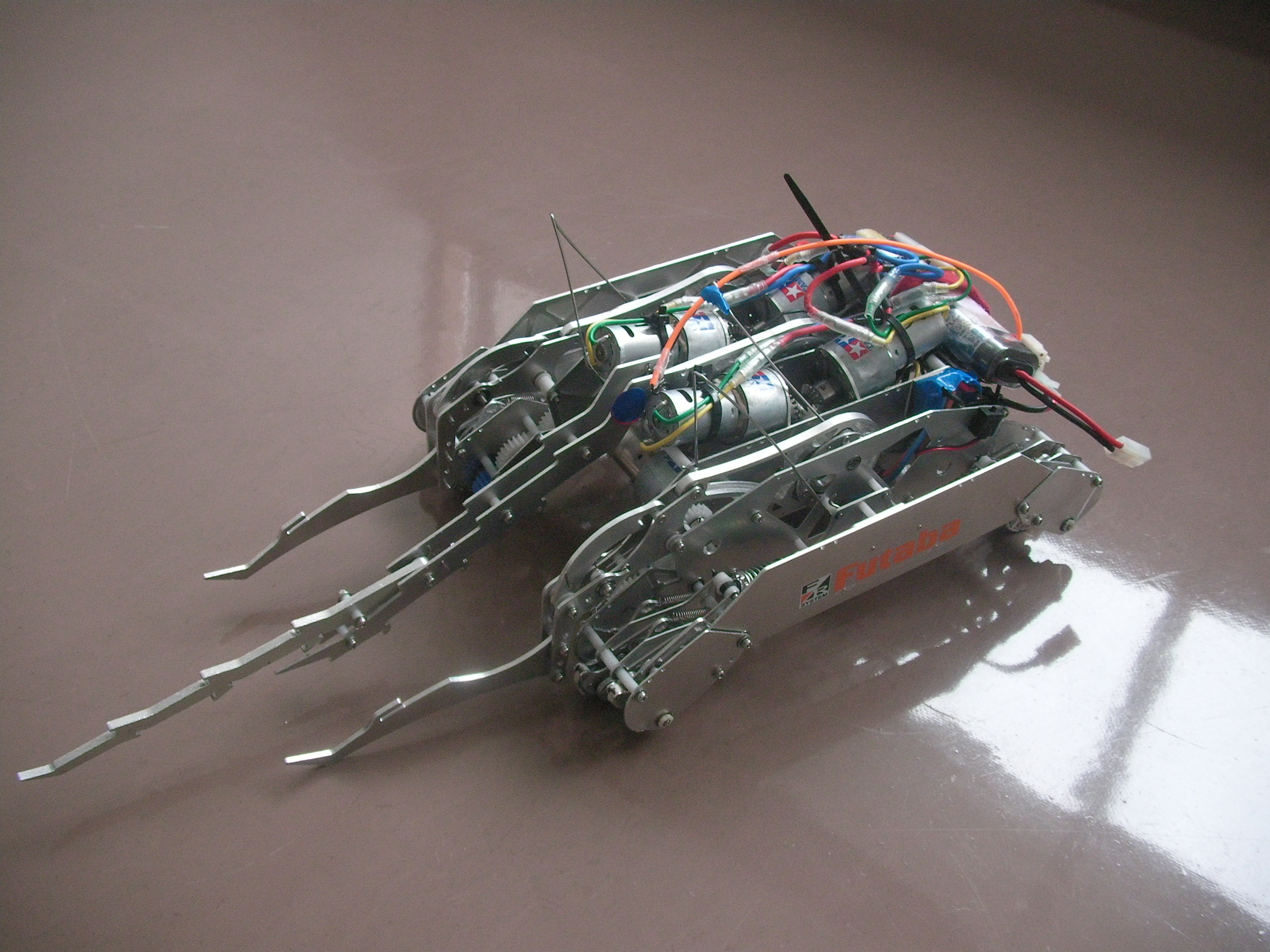
第14回かわさきロボット競技大会参加機
クシザシタロウXI
|
 |
【機体の変遷】
第14回かわさきロボット競技大会参加申込書(機体概要)
当初は横方向に広がる設計にしてました。
アームは二段構えにするところは決定していたものの、完全に2本に分割から関節付きの1本に変更。
足回りは横方向に350mmのまま固定、前後に脚を展開するイメージになりました。
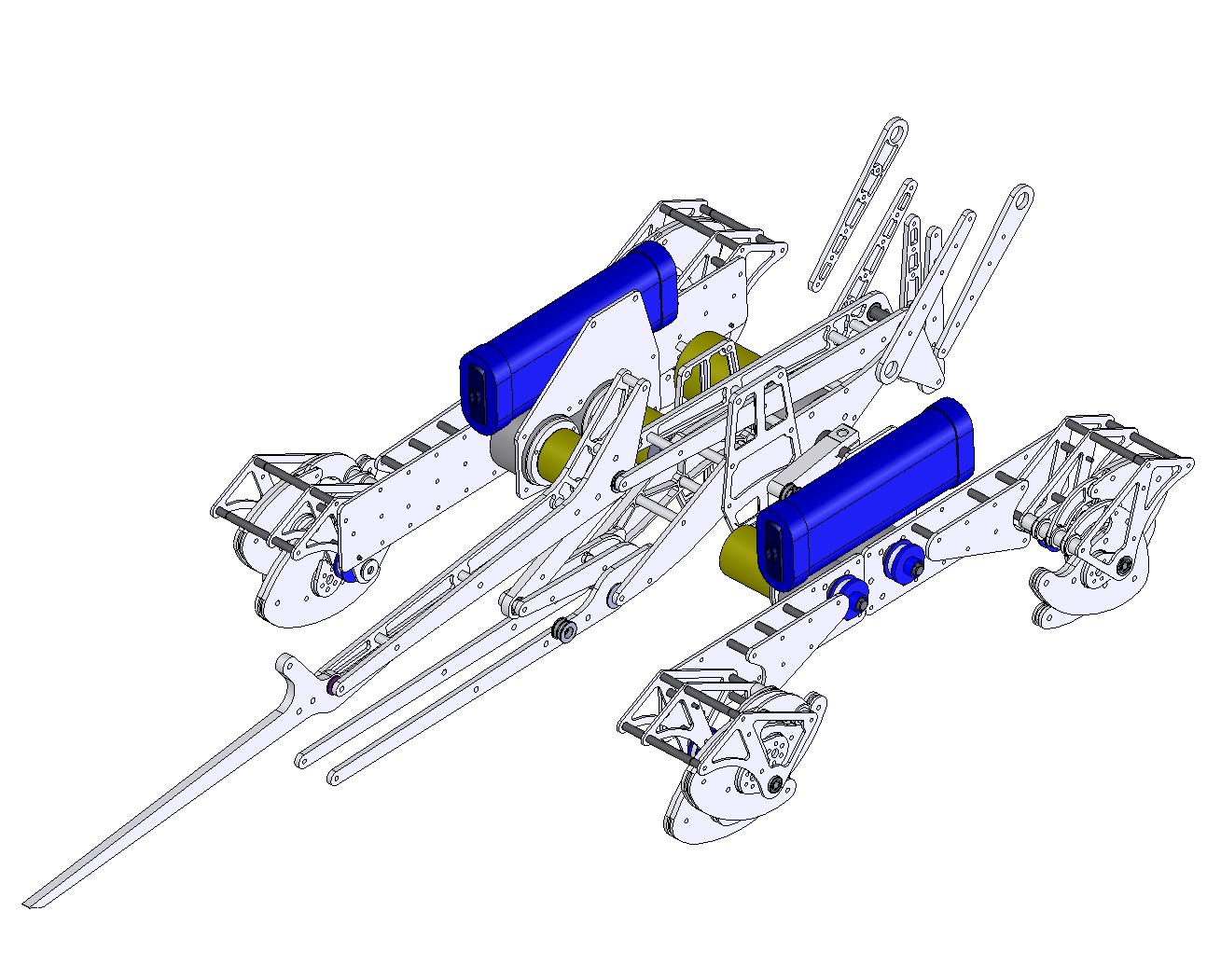
本来の形状。
しかしながら脚中央のギヤボックス周りの設計に無駄に時間がかかってしまい、直前に断念。
展開機構をオミットして脚ブロックは固定、転倒スタートとしました。
この図面が完成したのが大会の約10日前。よく間に合ったもんだ。。 |
【大会結果】
●初戦:VS AVANT
回転アーム系の機体。
あちらがアームを下ろす前にこちらのアームを差し込めたので、そのまま持ち上げながら押し切って勝ち。
●第2回戦:VS MADADEKITENAINO
回転シールドというか、バケット系というか。
側面から刺すしかないかと思ったけど、一気に詰めよらられてはじきとばされて負け。
●敗者復活一回戦:VS Zelkova
半径の小さい回転アーム系っぽい機体。
無線トラブルっぽく不調気味だったけど、なんとか試合開始。最初一気に詰め寄るも押し切れず、逆に側面を取られて危ない状態に。
慌てて逃げ回ってからしつこく刺しては持ち上げを繰り返し、最終的には押し出して勝ち。
●敗者復活二回戦:VS 小悪魔神楽
可愛い系と見せかけて凶悪系。特に操縦者の容赦なさが(笑)
回転アームに巻き込まれたら打つ手が無いので、止まったところを見て一気に密着し、そのまま押し合いに持ち込み。棒アームで回転アームを封じる方法って、これくらいしかないんじゃないかと・・・少なくとも離れたら負けということで、必死に食らいつきました。
押し合いへしあいでなんとか俵の無い方向へ向けるところまで持っていったけど、互いのアームが斜めに噛み合うようになったようで、おたがい同時に引っくり返って同着。
取り直した二回目はグルグル回しながら突っ込まれて、場外まで跳ね飛ばされちゃいました。。
後で見たらクシザシアームは削られてるわ転倒防止アームはひん曲がるわ、初期姿勢支持用のアームはぐにゃぐにゃになるわとエライコトになってしまっていた。
というわけで2勝2敗で予選落ち。
最後の負け試合を含めていい勝負が出来たと思うので、かなりギリギリな状況で作った割には上出来だったかと。 |
【反省点】
●転倒スタートはやめよう。
自重頼みの転倒はとにかく遅い。
さらに今回はサスも無かったので、転倒後に動き出すまでにもうワンテンポ必要なのがなんとも・・・
相手がアームだけ下ろすタイプとか何も展開しないタイプだと、自機が移動可能になる頃にはリング中央付近まで進んできており、どうしても受けに徹することになってしまうので戦術的に不利。
MADADEKITENAINOとか小悪魔とか、負け試合ではどちらも相手に先手を取られてるのは多分その辺りにも理由があるんじゃないかと。
多少機構が面倒でも移動しながら展開できるようにとか、アームのみ展開の方がよさげ。
●サスはあった方がいい。
転倒スタート時やら山にぶつけた時だとか、結構ピョコピョコ跳ねてるのが目に余る。
その後の交流会とかでサス付きの機体を見たけど、やはり地面の凹凸への追従性が非常に良いのでアレ欲しいなぁ、と。
●クシザシ
Zelkova戦で何度も刺しては持ち上げ損ね、を繰り返したのが非常に無駄だった。。
アームが刺さるときに引っかかるように、あるいは引っ掛けたあと抜けないようにトゲトゲした方が良いように思えた。 |